Autonomous Robot Part 2 – Tapeworm
|
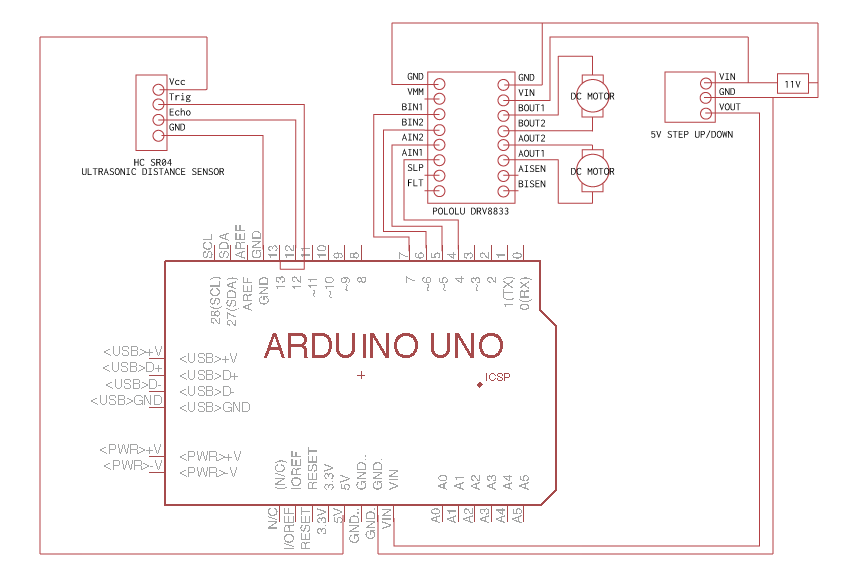
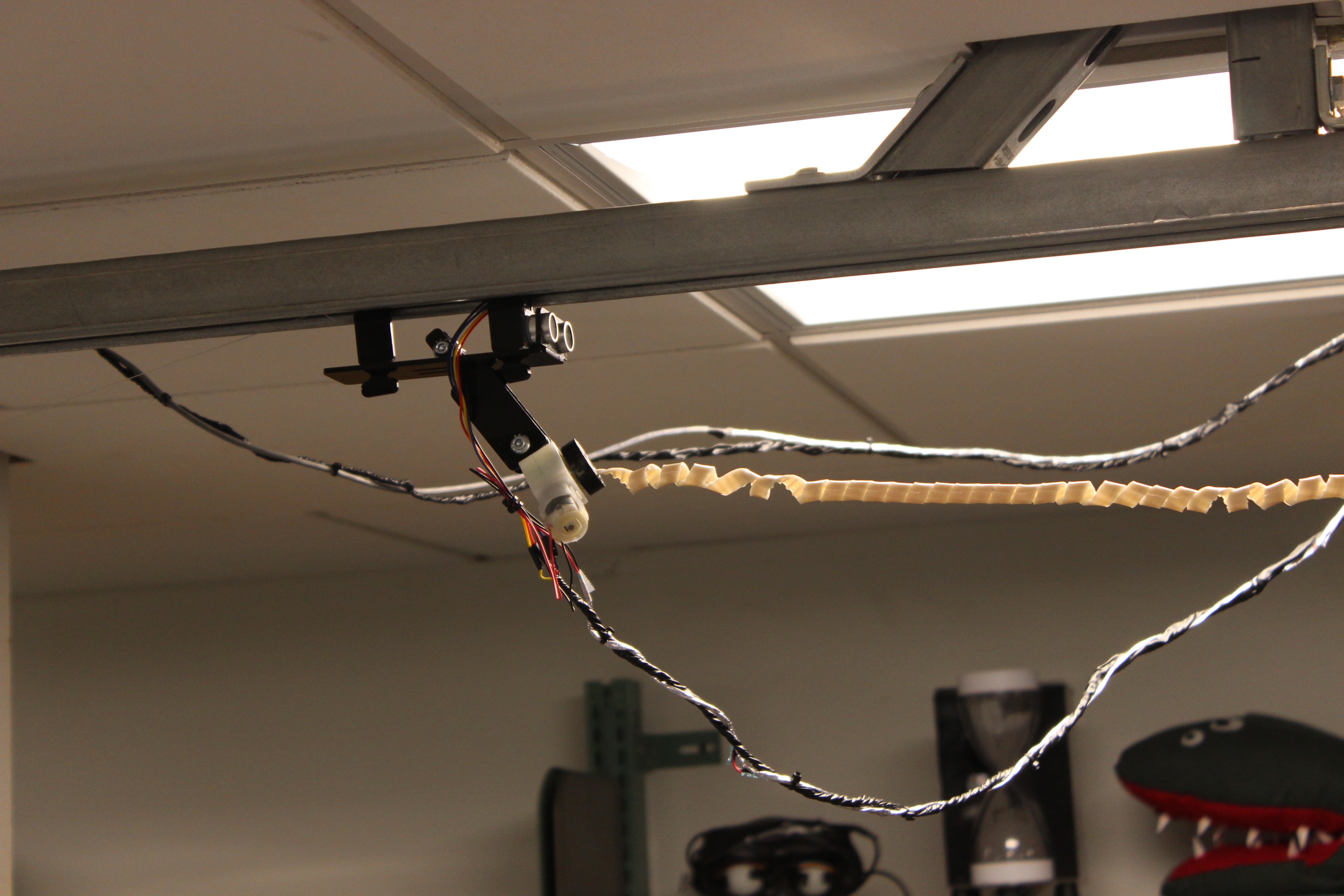
Group Members: Jeffrey Houng, Miles Peyton Roles: Jeffrey Houng and Miles Peyton as Scribes, Designers, Integrators, and Tutors towards each other. Introduction: In this age of robots becoming smarter and smarter and where they are starting to emulate living/natural behavior, we wanted to create an autonomous robot that had an organic and natural movement to it. Through this study, we found a timing belt that when twisted curls up and tightens/moves together in a gross, almost uncanny tapeworm-like way. When the motors turn on, there is an ear wrenching sound that accompanies the disgusting twist and movement of the stiff belt which wraps around itself and and forms random patterns autonomously. When the two ends get so tangled that they pull each other together, they reverse the direction and unwind the chaos created previously. https://www.youtube.com/watch?v=vxotbzjmEjc Technical Notes: We use a Pololu DRV8833 dual motor drive to control two DC motors, and a HC SR04 distance sensor to detect the distance between the two ends of the Tapeworm. The sensor faces a laser cut plate. Our circuit is powered by an AC adapter plugged into a wall outlet. We use a 5V step-down component to convert the 11V from the adapter to 5V to power the Arduino. The motors are powered by 11V, directly from the adapter. The Tapeworm is programmed to twist itself until it reaches a minimum distance, at which point it reverses direction until it reaches a maximum distance, causing it to reverse once again. The actual construction is created out of laser cut pieces which are custom fit to the railing that was available in the room. The railing provided a track for which the motor cars could pull towards each other. at the ends of both, were two weights that pulled them apart when unwinding. CODE: https://gist.github.com/anonymous/53185d2b3a5478e04184
|