Stepper Motor Examples - Raspberry Pi Pico¶
The following short Python programs will demonstrate essential operation of the
Raspberry Pi Pico board. These assume one or more binary input or output circuits are
externally attached. Each can be run by copying the program into code.py on
the CIRCUITPY drive offered by the board. The text can be pasted directly from
this page, or each file can be downloaded from the CircuitPython sample code
folder on this site.
Related Pages
Contents
Sample A4988 Stepper Driver Circuit¶
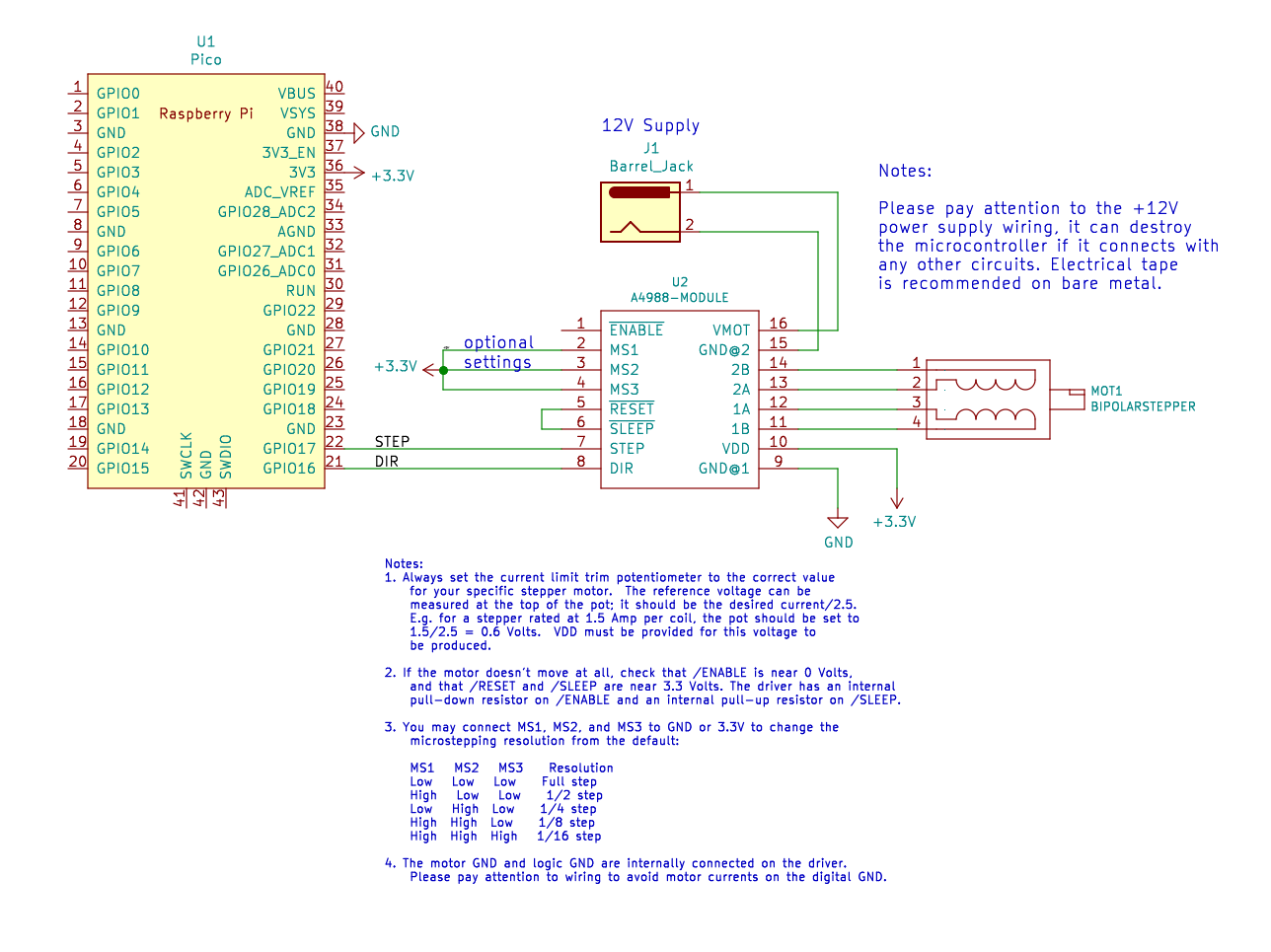
Sample stepper driver circuit using an A4988 module. Note that any two GPIO pins may be used to control the driver. Please be careful with the power wiring, motor voltages can destroy the Pico.¶
A4988 Stepper Driver Demo¶
Direct download: a4988_demo.py.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 | # a4988.py
#
# Raspberry Pi Pico - stepper motor driver support
#
# This module provides a class for controlling an Allegro 4988 stepper motor
# driver. This device can drive one bipolar stepper motor up to 2A per coil
# using microstepping current control.
# A typical usage requires two digital outputs. The defaults assumes a Pololu
# A4988 stepper driver has been wired up to the Pico as follows:
#
# Pico pin 21, GPIO16 -> DIR
# Pico pin 22, GPIO17 -> STEP
# any Pico GND -> GND
# A4988 carrier board: https://www.pololu.com/product/1182
# This implementation bit-bangs the step line and so is limited to about 1000
# steps/sec as a result of CircuitPython execution speed. This solution is is
# only suitable for low-speed stepper motion.
# Likely a better long-term solution will be to use the RP2040 programmable IO
# peripheral (PIO) to cycle the step output.
################################################################
# CircuitPython module documentation:
# time https://circuitpython.readthedocs.io/en/latest/shared-bindings/time/index.html
# board https://circuitpython.readthedocs.io/en/latest/shared-bindings/board/index.html
# digitalio https://circuitpython.readthedocs.io/en/latest/shared-bindings/digitalio/index.html
#
# Driver lifecycle documentation:
# https://circuitpython.readthedocs.io/en/latest/docs/design_guide.html#lifetime-and-contextmanagers
#
################################################################################
# load standard Python modules
import time
# load the CircuitPython hardware definition module for pin definitions
import board
# load the CircuitPython GPIO support
import digitalio
#--------------------------------------------------------------------------------
class A4988:
def __init__(self, DIR=board.GP16, STEP=board.GP17):
"""This class represents an A4988 stepper motor driver. It uses two output pins
for direction and step control signals."""
self._dir = digitalio.DigitalInOut(DIR)
self._step = digitalio.DigitalInOut(STEP)
self._dir.direction = digitalio.Direction.OUTPUT
self._step.direction = digitalio.Direction.OUTPUT
self._dir.value = False
self._step.value = False
def step(self, forward=True):
"""Emit one step pulse, with an optional direction flag."""
self._dir.value = forward
# Create a short pulse on the step pin. Note that CircuitPython is slow
# enough that normal execution delay is sufficient without actually
# sleeping.
self._step.value = True
# time.sleep(1e-6)
self._step.value = False
def move_sync(self, steps, speed=1000.0):
"""Move the stepper motor the signed number of steps forward or backward at the
speed specified in steps per second. N.B. this function will not return
until the move is done, so it is not compatible with asynchronous event
loops.
"""
self._dir.value = (steps >= 0)
time_per_step = 1.0 / speed
for count in range(abs(steps)):
self._step.value = True
# time.sleep(1e-6)
self._step.value = False
time.sleep(time_per_step)
def deinit(self):
"""Manage resource release as part of object lifecycle."""
self._dir.deinit()
self._step.deinit()
self._dir = None
self._step = None
def __enter__(self):
return self
def __exit__(self):
# Automatically deinitializes the hardware when exiting a context.
self.deinit()
#--------------------------------------------------------------------------------
# Stepper motor demonstration.
stepper = A4988()
print("Starting stepper motor test.")
speed = 200
while True:
print(f"Speed: {speed} steps/sec.")
stepper.move_sync(800, speed)
time.sleep(1.0)
stepper.move_sync(-800, speed)
time.sleep(1.0)
speed *= 1.2
if speed > 2000:
speed = 100
|