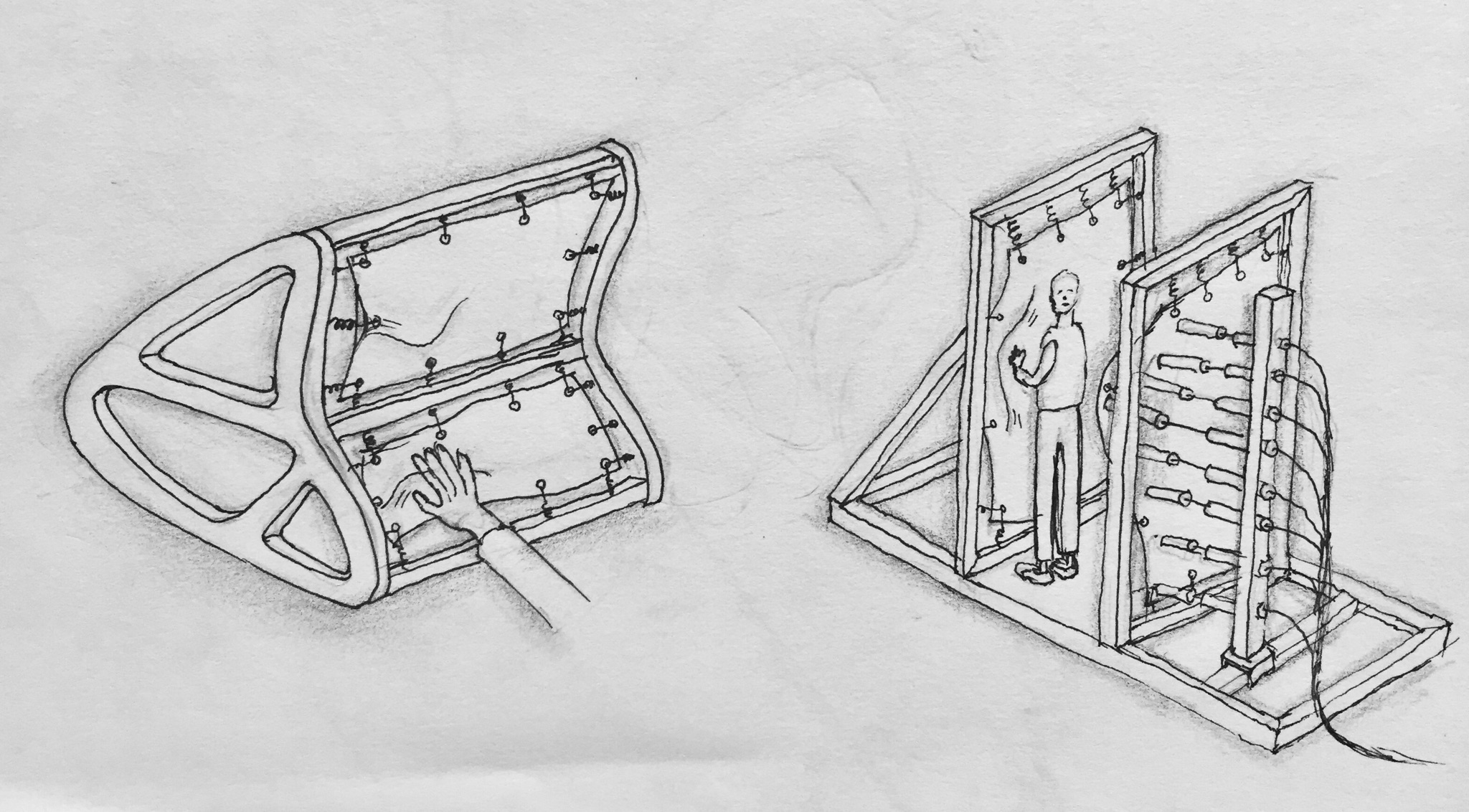
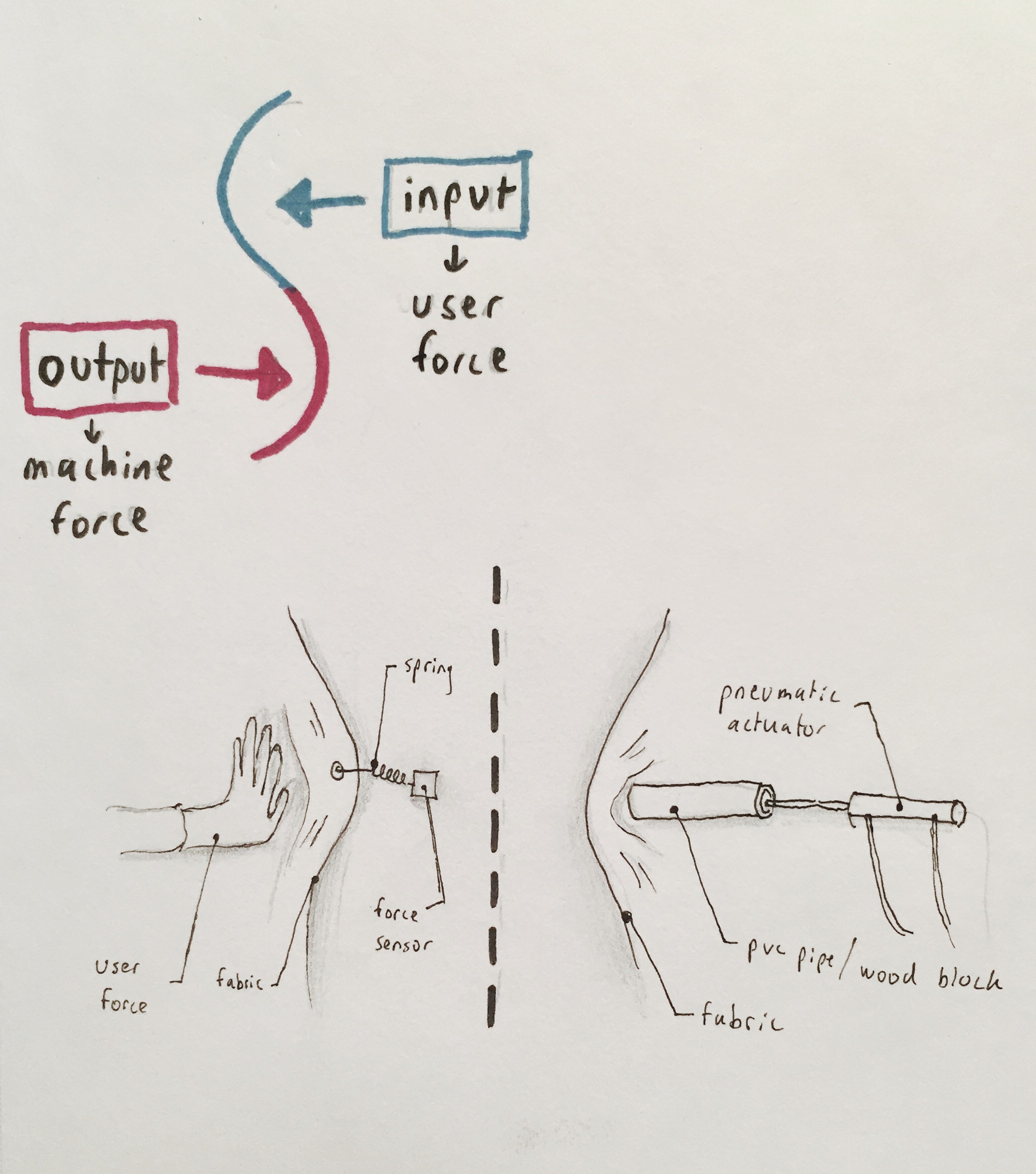
This project develops an interactive relationship between two machines: the arm or hand of a user and mechanized arms powered by pneumatic actuators. Displacement of fabric from a target location is observed by force sensors and causes the arms of the counterpart machine to mimic the behavior of the user. In other words, as the user pushes on the fabric the mechanized arms push on a separate piece of cloth in a similar location, thus giving the user agency. The fabric, the object in this case, is stretched within a framework with springs which are attached to sensors (another machine). As the fabric is stretched the springs expand, activating the sensors which communicate the relative location of the applied force to the actuators to imitate. My sketches show two variations of the project: one in which the direction of force from the actuator is the antithesis of the user’s and one where the directions are equivalent. The possibilities in scale also varies greatly from a tabletop apparatus to a human-sized environment.
The narrative of the project centers around blurring the distinction between the human and the machine by masking the appearance of the mechanized arms to the user in the same way their internal “machines” are masked by skin. All they will see from their vantage point is the movement and stretching of the fabric based on the force they apply. The physical form of the system and use of fabric allows the dynamic aspects of the project to be revealed to users rather than being completely visible. When looking at the fabric in an orientation which hides the machines, both user and actuators, the intention is to minimize the distinction between the effects on the fabric when both apply force.
In addition to the materials mentioned above, there will need to be some device to attach to the actuators which will interact with the fabric. Pvc pipe or wood blocking may be sizable enough to mimic the pressure of the user’s force but additional options will need to be explored. It is possible to cut corners with the number of actuators and sensors used because a smaller, much simpler apparatus which exhibits the same intent could be produced.
Comments are closed.