Main Idea:
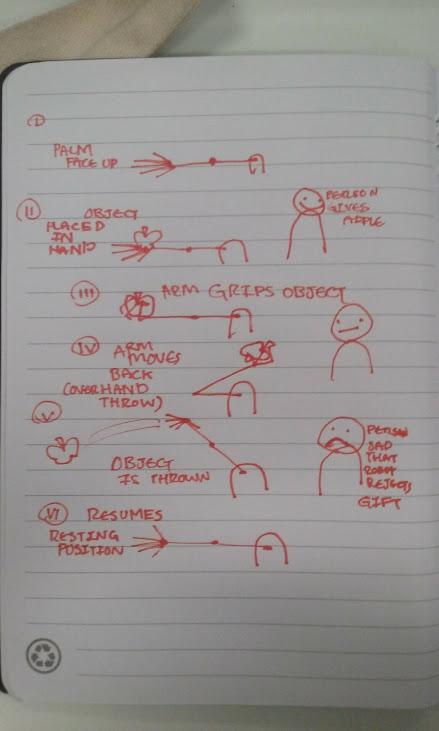
Build an animatronic Hand (resting position is palm up). It has sensors to tell when something has been placed in it. Once it receives an object, it uses weight sensors to find out how heavy the object is, and Then throws it onto the floor.
Narrative:
Robots are generally made to help out people. If you give a robot something, it should in theory help you out with a task or store it for later. Instead, the robot is its own entity and wants nothing to do with you. It does not care about your existence and will throw anything, even well meaning gifts, far away from itself.
Things Being Explored:
How to people react to this? Are they upset because the robot has rejected their gift, even though the robot has no conscious and hasn’t really done anything?
Would it be more meaningful if the robot accepted certain things, like food (which it cant use), and collects that but throws everything else out? Would doing this change the perception of the robot from just unfriendly to greedy and rude?
Also consider: Size. A human sized hand is more realistic, a large one more ominous, a small one kinda funny
Implementation & Materials:
There are many ways to build simple hands that rely on elastic instead of electronics to move the fingers, these designs could be used with pneumatics to create a hand that is controlled by the computer. There would also need to be rotation in the wrist, unless it only throws underhand. We can hook up pressure sensor to the palm of its hand to that it knows when something is placed, and to tell how heavy it is (dictating how much force should be used to throw it however far). Actually throwing things would involve A catapult or trebuchet like mechanism that propels the object into the air as the robot lets go of it.
Materials: Arduino, sensors, 3d printed plastic, pneumatics
(This is not fully planned out but thats what the rest of the semester is for 🙂 )
If Time:
Using cameras to observe surroundings and dictate where to throw things (i.e. at someone but thats probably not the safest route), this would involve further rotation of the arm. Alternatively building more of the torso of the bot to ground it more.
Comments are closed.