The Hand
By Tatyana Mustakos, Svayam Mishra, SooJin Sohn and Yitong Wang
Project narrative
- Final Overall Concept: ”The Hand”, is a robotic arm that rejects all objects placed on its hand, by throwing the objects over behind its shoulder.
- Performance Objectives: Our major performance goals consisted of having our elbow and shoulder rotation hooked up successfully to our pneumatics, as this was the minimum viable animation needed to throw or give the appearance of throwing. After that was setting up the hand to open and close, and the load sensor to detect when the hand has something in it
- Narrative Description: When the viewer/participant approaches the piece, they would have seen an open palm, with an assortment of objects near it, and a few objects on the floor behind it. If needed, a set of instruction either through icons or text indication they should place something in the palm. Once they did, the arm would gently bounce up and down momentarily, then toss the object over its shoulder, and then move its hand back.
Reflection with respect to course theme
- We have taught ourselves that robots are generally made to help out people. Through this project, we are challenging such perception of robots being “helpful” by making a robotic arm that rejects all objects that it receives from users. Specifically, the arm will first grab an object once received, then suddenly throw away the objects over its shoulder. In theory, the robotic arm would be expected to help the users in some way (e.g. offer guidance, store the given object to somewhere else, and so on). Instead, the robot will act as its own entity and will not care nor assist with the users and throw anything away, even well-meaning gifts.
Outcomes: Successes and Failures
- We have successfully made the arm to move in the direction we desired. By moving the elbow and the shoulder, the Hand can move the object out of its hand.
- The shoulder actuator cannot output enough force to move the shoulder and lift the whole arm. The problem is that even the air is extracted from the pneumatic actuator, the actuator will not retract properly.
- Our choice of acrylics resulted in having too much weight for the actuators to lift up the armature. Due to that, the fingers cannot grab nor release an object at the right timing.
- The slow nature of the actuator motion does not generate enough momentum to “throw” the object.
Performance Video
Technical References
We did research into preexisting robotic hands and arms to see the different ways to deal with more natural aesthetics and functions
- Sparkfun Tutorials: Getting Started with Load Cells <https://learn.sparkfun.com/tutorials/getting-started-with-load-cells?_ga=2.142226098.125513916.1513572005-941765866.1511167360&_gac=1.170527252.1511585988.EAIaIQobChMI3OyiyvjY1wIVi0oNCh2wZg6nEAAYASAAEgJ26_D_BwE>
- Pneumatics Animation Example <https://courses.ideate.cmu.edu/16-375/f2017/text/lib/pneumatics_animation.html>, Garth Zeglin.
- Pneumatic Valves and Actuators <https://courses.ideate.cmu.edu/16-375/f2017/text/lib/pneumatics_animation.html>, Garth Zeglin.
- Pneumatics Animation.sensor
Protocol <https://courses.ideate.cmu.edu/16-375/f2017/text/_modules/pneumatics_animation/SensorProtocol.html>, Garth Zeglin. - Shadow Hand <https://www.shadowrobot.com/products/dexterous-hand/>
Supplementary Technical Documentations
- Program source code(sensors) + Mechanical CAD files(armature + hand structure) + OpenSCAD files(finger structure)
- Link: https://drive.google.com/open?id=1PDRmN6g38FdnYzY0HFbwuCRNVQw2aRS0
- Contents
- Photos + Videos
- Arduino + Python Codes
- Finger OpenSCAD Designs + Arm CAD Designs:
- OpenSCAD (in Finger OpenSCAD Designs folder)
- hands.scad: hand with finger connectors
- finger.scad: finger(length)creates finger segment with designated length(in mm)
- finger Modular.scad: the joint that attaches fingers together
- OpenSCAD (in Finger OpenSCAD Designs folder)
-
- Photographs:
- The Hand (front view)
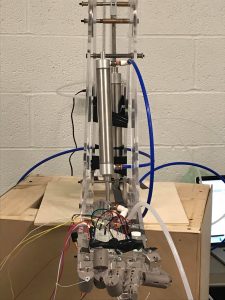
- The Hand (bottom view, hand close-up)
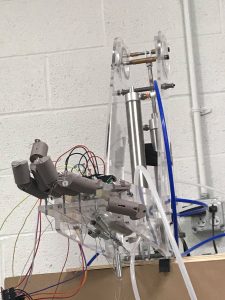
- The Hand (top-side view)
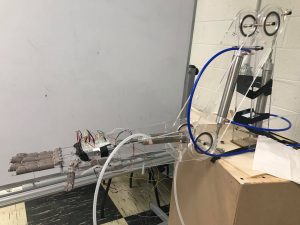
- The Hand (back view)
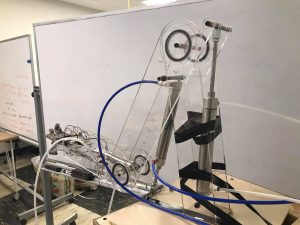
- The Hand (forearm bearing)

- The Hand (sensor connection with actuators)

- The Hand (front view)
- Photographs:
Member Contributions
- Svayam Mishra
- CAD of upper and lower arm
- CAD of upper arm to pedestal connector segment, and pedestal top
- Assembly of final construction
- Tatyana Mustakos
- Original Concept and Ideation
- Finger Design and print
- Pedestal frame construction
- Rigging of springs
- Assisting with final construction
- SooJin Sohn
- Arduino and python coding
- Arm animation Control
- Exhibit Poster Design
- Yitong Wang
- Arduino and Python Coding
- Arm animation control
Comments are closed.