Scare-case
The Sensors:
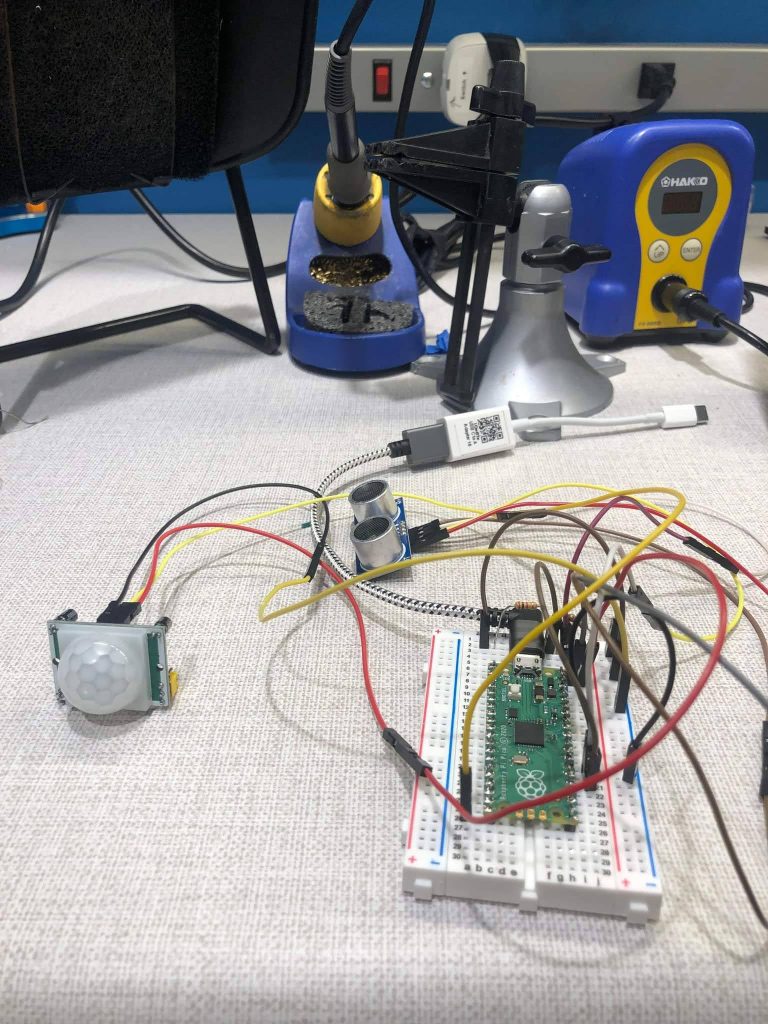
Progress: Tested out usage of the PIR motion sensor and ultrasonic sensor by hooking it up to the Raspberry Pico. The ultrasonic sensor works using Garth’s sample code. The PIR motion sensor still requires some fiddling.
Next up: figuring out how to tame the PIR motion sensor + writing the basic sensor skeleton code that will control the output processes (e.g. rattling motor, locking hinge)
The Rattling effect:
attached egg shape disks to gear motors to lift sides case and make rattling happen. I will wire and test interaction with case in class.

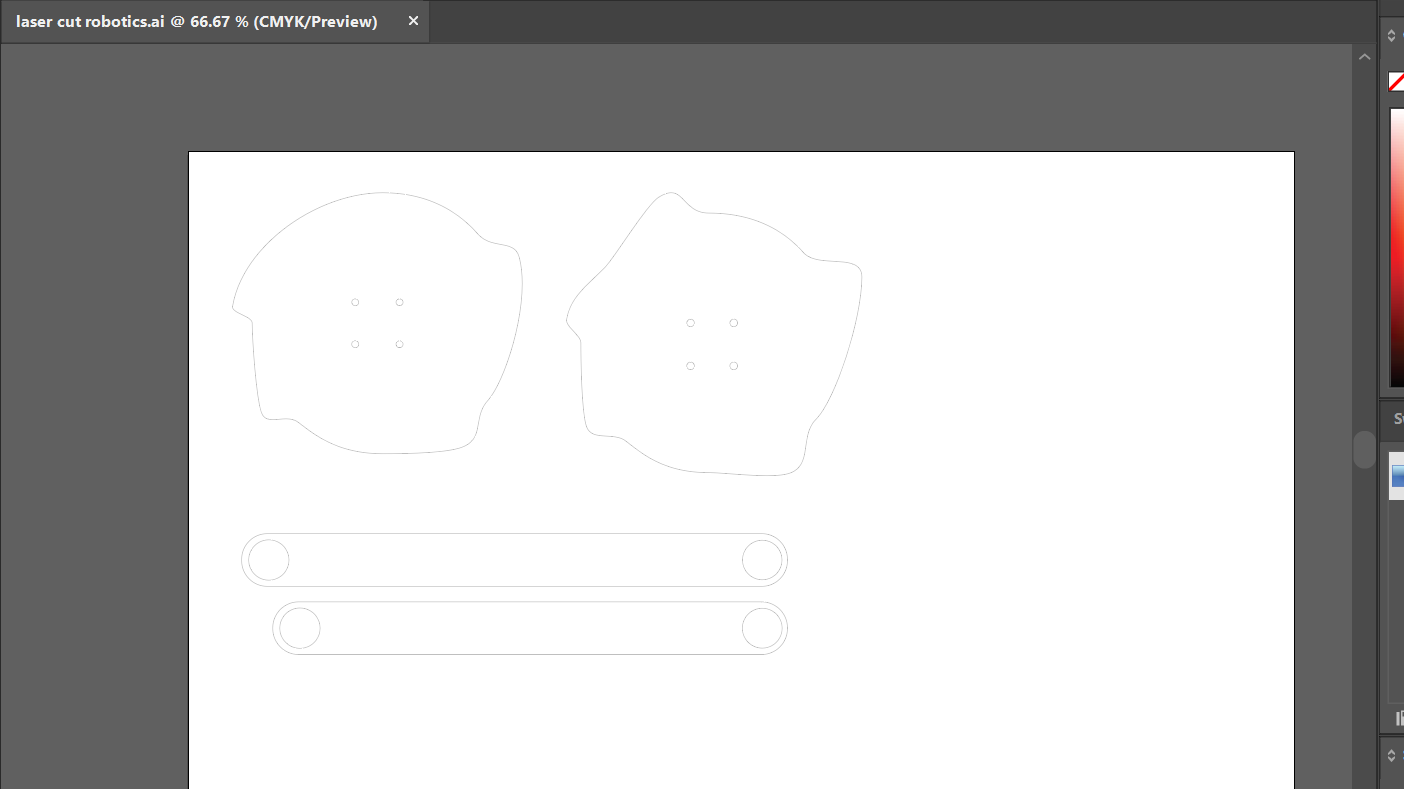
will cut these other shapes to try out different effects. hinges are in process.