This week, while not much physical prototyping has been done, we’ve narrowed down the scope of our final project in both code and CAD.
The cuttlefish controller will use two measurements as input:
1. A potentiometer on the hinge of the box, to determine when the box is opened 2. A ultrasonic sensor on the front of the box, to determine when someone approaches the box
It will have the following actuators:
1. A solenoid (linear actuator), to close the box.
2. A fan for each of the four inflatable arms, to extend the arm.
3. A motor for each of the four inflatable arms, to retract the arm (by reeling in string threaded through the arm)
4. A 180º servo motor for each of the two laser-cut tentacles, to wave them up and down.
Initially, the box is closed, and the arms and tentacles of the cuttlefish are retracted and fully inside the box. We imagine the interaction proceeding as follows:
1. When the observer comes into a certain range of the ultrasonic sensor, the fans will turn on to begin inflating the arms, and the servo motors on the tentacles move slightly to create noise.
2. When the user opens the box (detected by the potentiometer), the inflated arms should naturally pop out of the box, and the servo motors will move back and forth wildy to make the tentacles flop around.
3. After a certain amount of time, or once the ultrasonic sensor detects that the observer has moved away, the fans will turn off, the motors will retract the arms.
4. Finally, the servo motors will turn fully to make the tentacles “reach” upwards, and the solenoid will close the box.
We currently have a draft of the script for the cuttlefish controller which includes code to control multiple servo motors and code to determine when a person approaches and leaves the box based on the readings from an ultrasonic sensor.
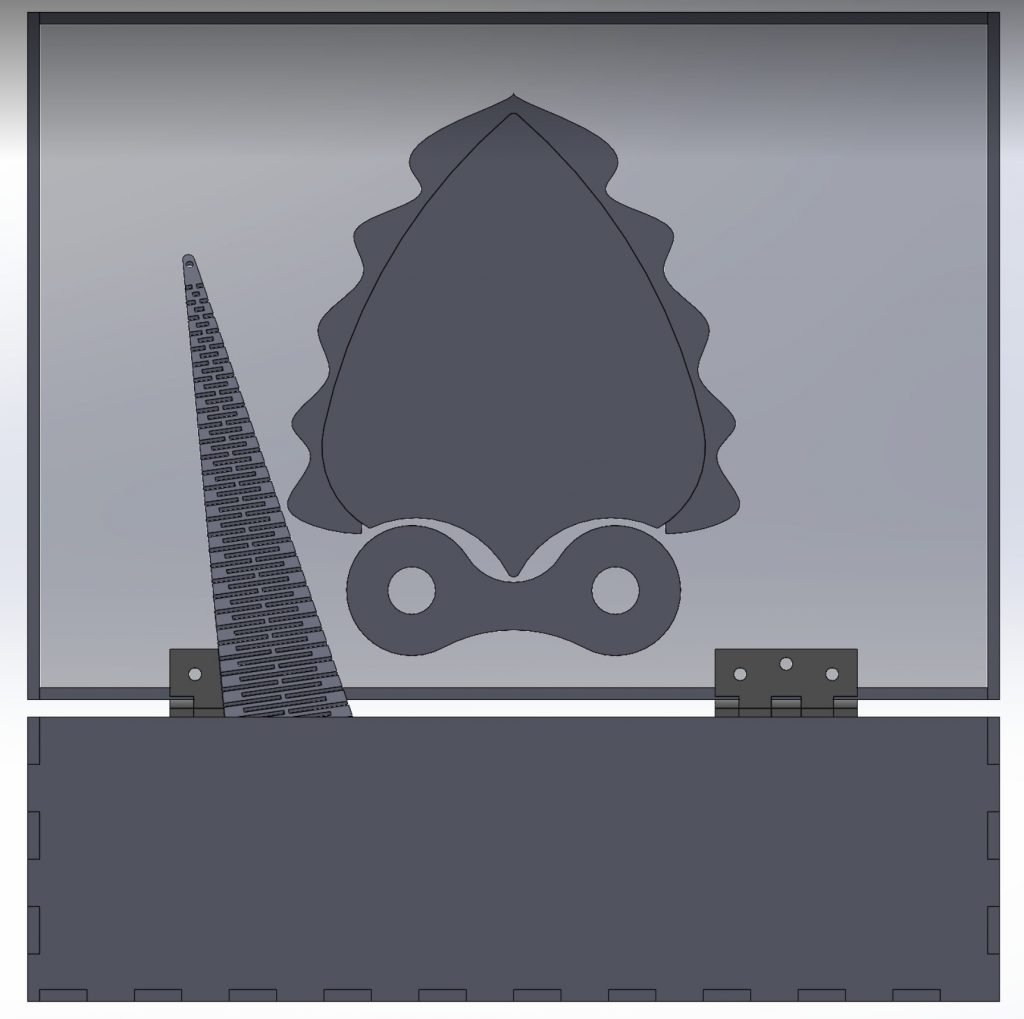
On the CAD end, the box has been finalized, as well as the face of the cuttlefish and the mechanisms in which it moves.

Similarly to the first suitcase assignment, we have an inner casing under which most of the electronics will be. We plan to have 4 actuatable tentacles using fans, and two bendable lasercut arms which will be actuated by servos. We’re currently playing around with the angle on the bendable arms to get something we like.
The cuttlefish head itself is directly attached to the top of the suitcase. We plan to have electronics behind it for the eyes and the frill (container for that not currently CADed).

The front of the inner box is reserved for the Arduino. We have the code to control motors with the adafruit motor shield, but will be working on using transistors to control the dc fans this week during class. This week we’ll also get one tentacle fully working and CAD the mounts for the rest of the electronics, finishing the suitcase CAD.
Annie also dug a linear actuator out of her closet that we can use for opening and closing the suitcase. We’ll also be figuring out how to use that this week.