Project Objectives
The objective of this project was to create an ecosystem of swimming jellyfish robots that could actuate soft tentacles underwater to produce movement. In terms of an artistic vision, we wanted to create a peaceful and calming piece. We aimed to create two types of jellyfish: one jellyfish that is fully actuated with 3 independently moving legs, and one jellyfish that has a single actuator and moves by catching the current. By showing these two jellyfish together, we can draw contrast to their differing modes of movement; one jellyfish being self-sufficient and the other depending on the water’s movement.
The fully actuated jellyfish represents an interpretation of bio-mimetic robots where the form of the robot closely resembles the structure of natural organisms, but the functionality is much more complex. The goal of the single actuator jellyfish was to produce a soft robot that mimics both the form and function of jellyfish in nature, which primarily ride ocean currents for locomotion with minimal intervention through movement.
Creative Design Opportunities
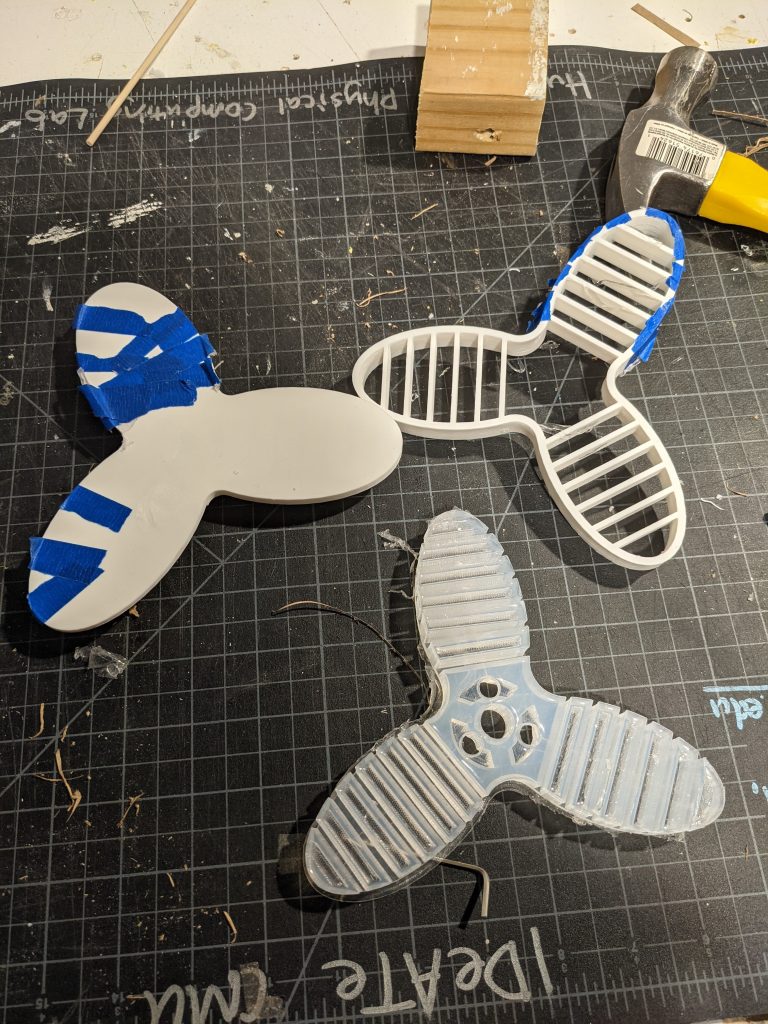
We used molded soft silicone to make the jellyfish. The soft material allowed for each leg to be flexible. The soft material allowed channels to expand when filled with water, which caused a leg to bend. The soft material also meant that the jellyfishes would be gently moved and rippled by the water currents, and give the effect of floating.
Outcomes
We successfully designed and fabricated two jellyfish.
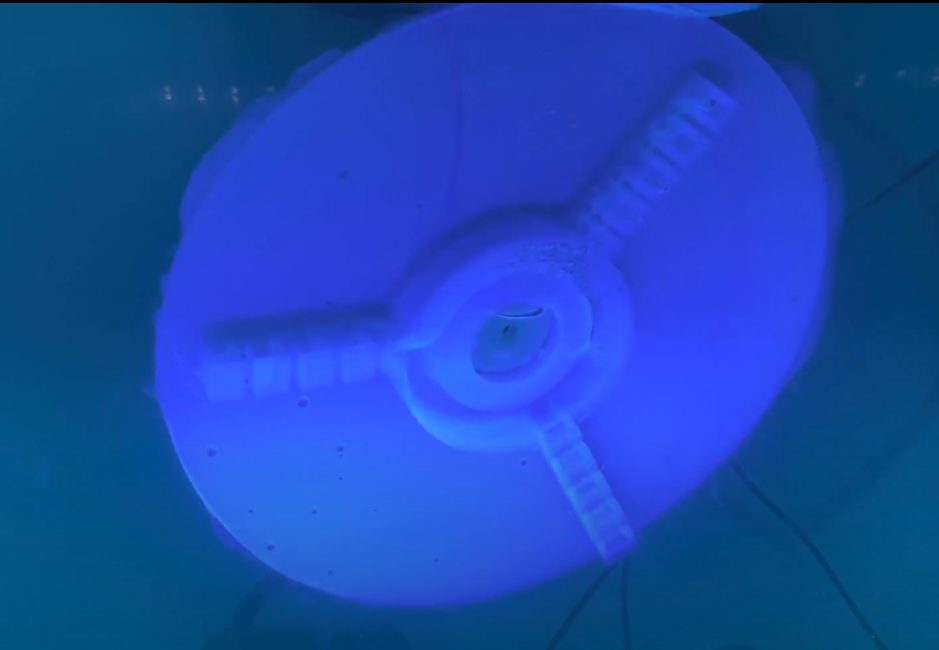
The biggest success was the pronounced movement of the jellyfish legs of the 3-legged jellyfish. The motor pump combined with the small water channels allowed for a very significant bend in the legs. Furthermore, we were able to refine our molding and bonding process to produce a final jellyfish without air leaks or accidentally sealed channels. We adopted design elements and techniques from the JenniFish paper cited below. We created a two part mold for the top piece of the jellyfish, which was bonded to a thin bottom flap. We used clamps to ensure a tight fit for the two part mold which prevented leaks.
Areas of improvement include the buoyancy and displacement of the jellyfish. The silicone molded part is too heavy to float once the inside is filled with water. We added a balloon to compensate for the buoyancy so that the jellyfish would be more neutral with the water and float. However, it was difficult to get the inflation of the balloon perfectly so that the jellyfish would float suspended in the water instead of either sink down or bob to the top of the water. Furthermore, we had hoped motions like pulsing would create more vertical motion such that successive pulses would allow the jellyfish to swim up with a significant displacement from the starting position. However, the jellyfish mostly stayed in place. For the 2-legged motion, we did see noticeable horizontal displacement and the jellyfish was propelled in the direction of the non-actuated leg. Thus, we assume that the problem with vertical displacement is related to the buoyancy issue described earlier.
In addition, the single-actuator “passive” jellyfish could have had a more distinct movement. There were a few air leaks in the legs, and the flap was slightly too thick, making it difficult for the thin legs to bend it.
Video
Citations
Frame, Jenny. “Self-contained soft robotic jellyfish with water-filled bending actuators and positional feedback control.” (2016). https://fau.digital.flvc.org/islandora/object/fau%3A33675/datastream/OBJ/view/Self-Contained_Soft_Robotic_Jellyfish_with_Water-Filled_Bending_Actuators_and_Positional_Feedback_Control.pdf
Frame, Jennifer & Lopez, Nick & Curet, Oscar & Engeberg, Erik. (2018). Thrust force characterization of free-swimming soft robotic jellyfish. Bioinspiration & Biomimetics. 13. 064001. 10.1088/1748-3190/aadcb3.
Chai, Katie. Soft Robotic Jellyfish, Instructables. https://www.instructables.com/Soft-Robotic-Jellyfish/
Technical Documentation
Fully Actuated Jellyfish

Passive Jellyfish
CAD
Drive Link: https://drive.google.com/drive/folders/1uOuozLeJPmjkVByYSKEhGGOgxZAxN89-?usp=sharing
Contents
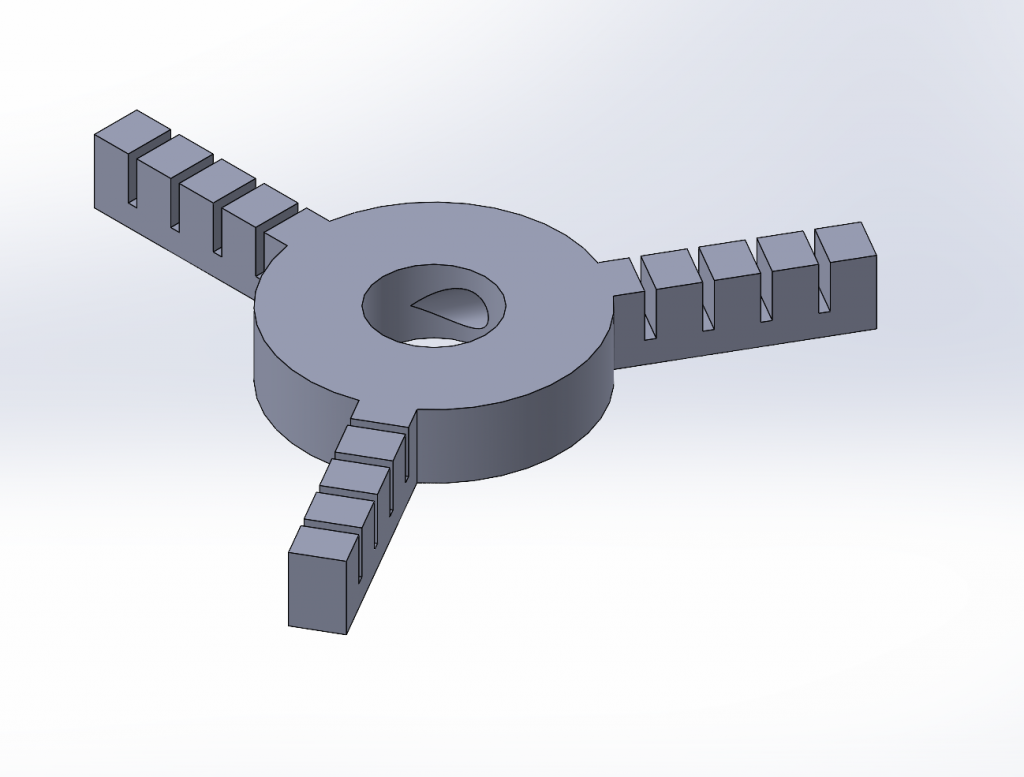
Hand Pump Test: model of a single actuated tentacle with a hand pump
Tension Wire Test Arm: Wire driven, manually actuated tentacle
Tension Wire 2: Second iteration of tension wired tentacle
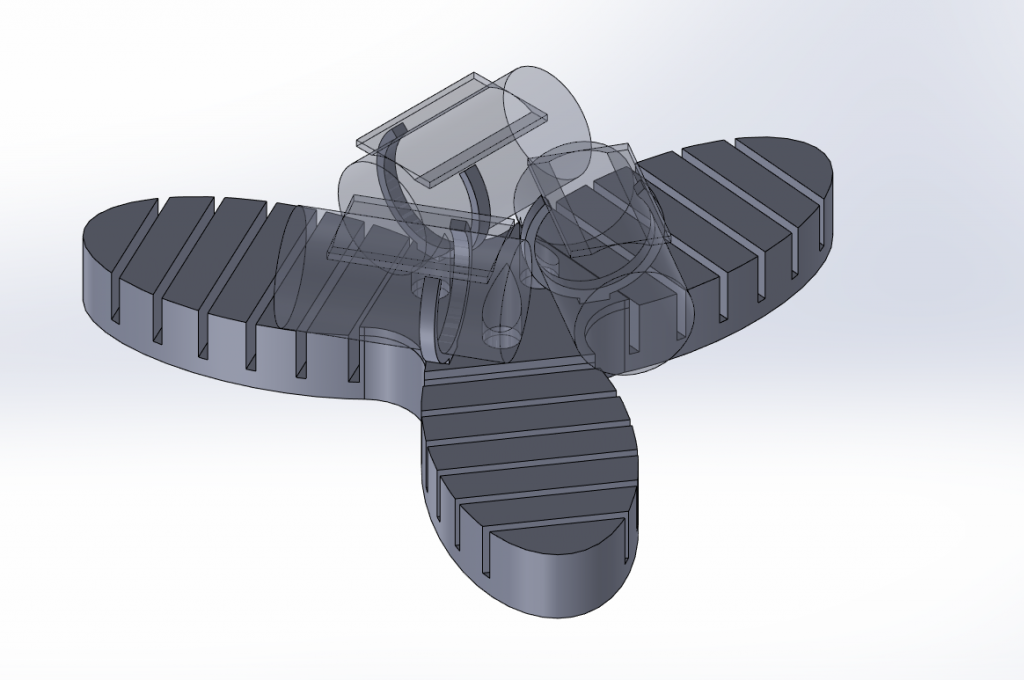
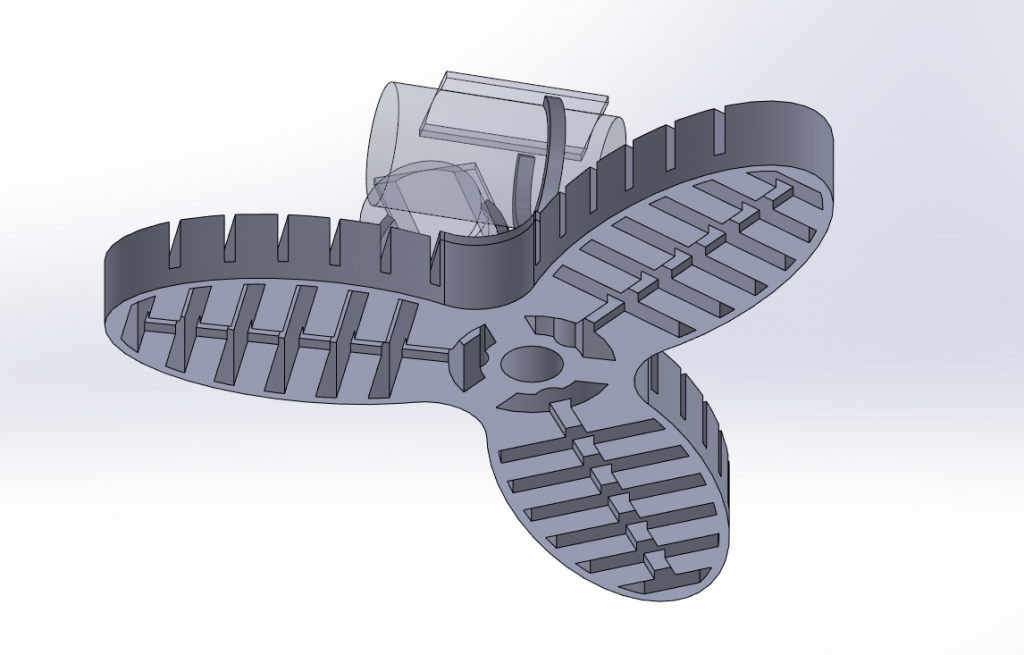
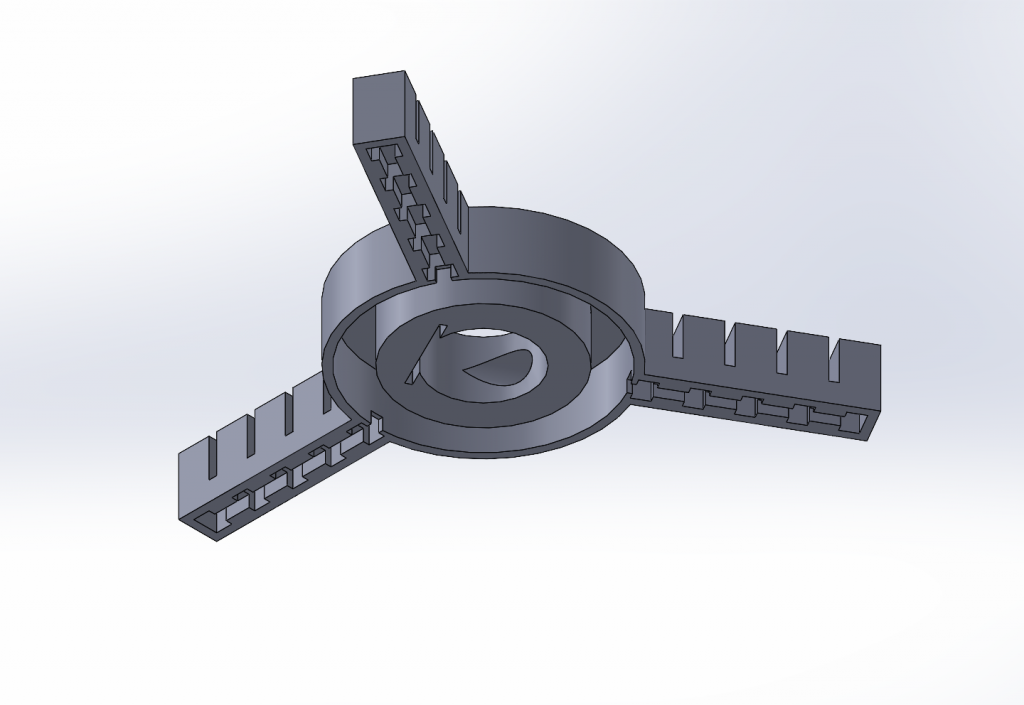
Jasmine Jellyfish: First design for full jellyfish with 3 tentacles and one pump
Jellyfish 2.0: Second and final design of 3 tentacle jellyfish with independent tentacle actuation via 3 pumps
Smol jellyfish: Passive, single pump large flap jellyfish
Source Code
https://drive.google.com/file/d/13dDZ4bJURZZgL-e9u6N5yBAhruQPjPO6/view?usp=sharing
Contributions
Both partners worked on both jellyfish design and fabrication fairly equally. Jasmine wrote the code.