My idea is to use motion/distance sensors in order to manipulate the locomotive patterns of a soft robotic fish tail. Using simple gestures such swiping left/right with different rotation angles or giving various values to two distance sensors alternatively, one’s could manipulate the morphing of fluidic elastomer actuators, causing this way the tail to swim in different patterns (swim straight/turn right/left, big/small maneuver) .
In a greater scale and later one, this semi-autonomous fish tail could be designed and fabricated for motion impaired people, who meet difficulties exploring their body’s motion underwater. Having a personal trainer who manipulates externally their prosthetic tail, their body could develop different speeds, turns and navigation using dolphin style.
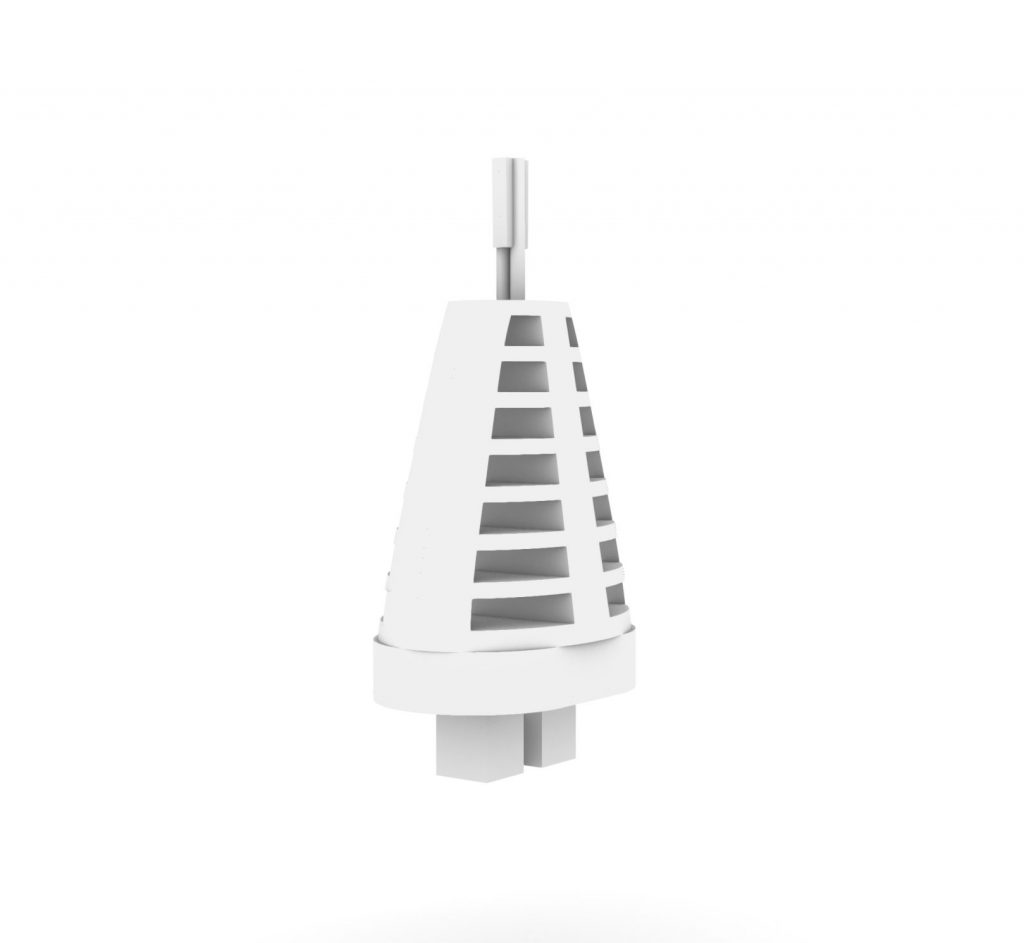
The fish’s body is composed out of two fluidic elastomer actuators (with chambers) separated by a constraint layer. The latter one tries to constraint each actuators deformation and as a result the tail bends.
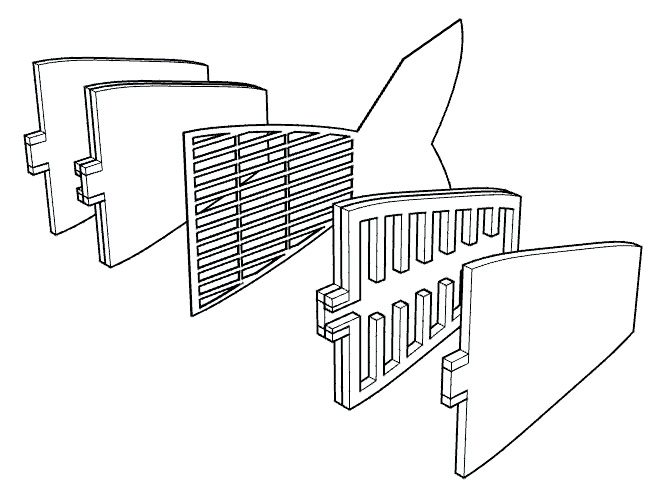

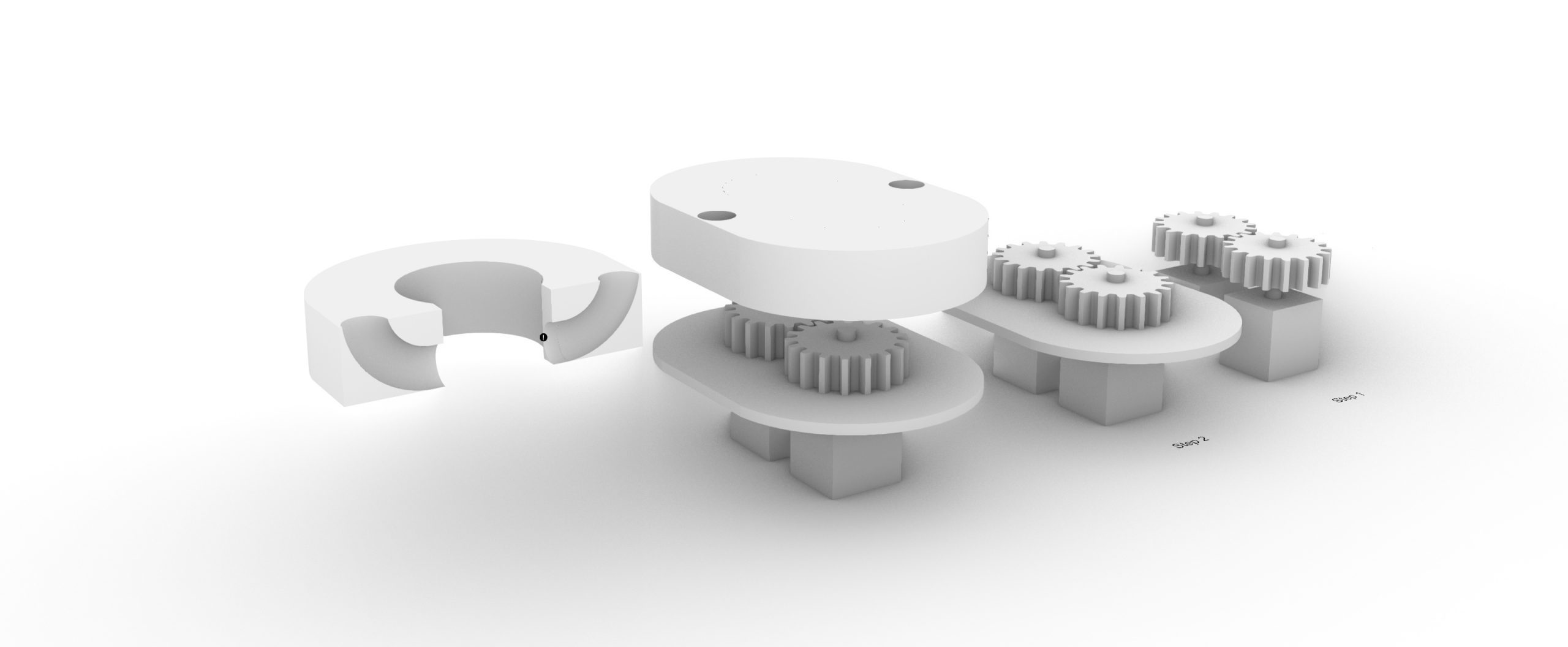
The liquid transfers from one chamber into the other using a gear pump, where two DC motors cause the gears to rotate in different directions.