My idea is to make a keyboard that is a symbol for confusion. It’s exterior will look perfectly alright but on playing it, the user will find that the keys produced tones completely different from what they expect. And the tone that each note plays varies in random time and there should be no seeming pattern in the confusion. However, there will be brief periods were the keyboard will be lucid again – allowing the user to savor the few moments of normalcy before it is consumed again by its confusion.
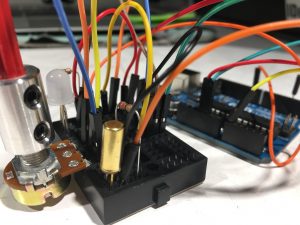
The project as it stands lacks form. I decided to focus on making the essentials work and efficient code for the first draft of this project. An Arduino Teensy is used to create different types of waveforms that can be outputted through its DAC. The signal from the DAC is amplified using a standard 2.5 W Class D amplifier that then connects to the speaker. The Audio library proved to be extremely helpful in the creation and the handling of the waveforms. It took a lot of time and effort to troubleshoot and create the output of waves from the DAC and then in using the amplifier chip. However, many trivial but crucial mistakes were found that when fixed allowed the system to work quite well.

Writing the code has been one of the more challenging parts of this project. I have learnt a lot from observing how changing code in one part of the program can affect the function of all other parts. Also, I noticed that every time I added a functionality in the code, there were new edge cases that I needed to account for. This has been a great learning experience.
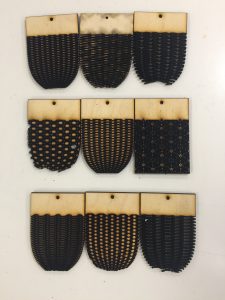
The next thing I want to focus on is the form of the project. My ideal path forward would be to obtain an old, cheap keyboard and strip off most of the electronics to access just the keys. I would then be able to connect the keys from the Arduino and control the sound exactly the way I described above. If this proves to be very hard, I would like to fabricate a simple but appealing keyboard using laser cut wood or acrylic.
Video 1: Perfect Sine-wave based polyphonic synthesizer
Video 2: Confused Piano
 BrailleTutor
BrailleTutor