Confused but Irritated Faces
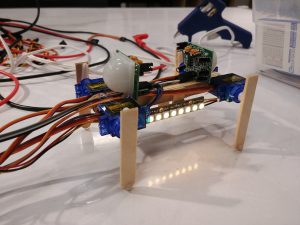
For this assignment, I wanted to transition a face from a neutral expression to an irritated expression by changing the states of each motor (6 in total, 2 for the mouth, 2 for the eyes, and 2 for the eyebrows). If the audience were to come near the photosensor, the motors would go to new positions to scrunch and look towards the direction of the sensor (maybe to warn the audience not to come near).
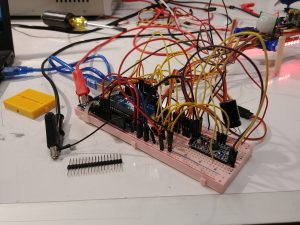
This project was relatively straightforward, but over time I interestingly ran into a few problems (still unresolved). My general process was to take each servo one by one, to ensure each of the motors would respond to the sensor. The first time I put everything together, the servos worked correctly (see video), but after half an hour or so, the servos started fidgeting. At first, I thought it was the way I programmed it, but over time I came to realize that the amount of power needed to control 6 servos was too much. The second time around, when I assembled more than 2 together, they would fidget and not work correctly (no changes to the program made). If I were to refine this, I would like to play with an alternate power source to avoid the fidgeting.
Video: https://youtu.be/6wD-HHZuRHU
Zip File: https://cmu.box.com/s/y8exprgw8plgt1gtg83e3b6j8i0cwl3i