Final Project – Acrobotic
|
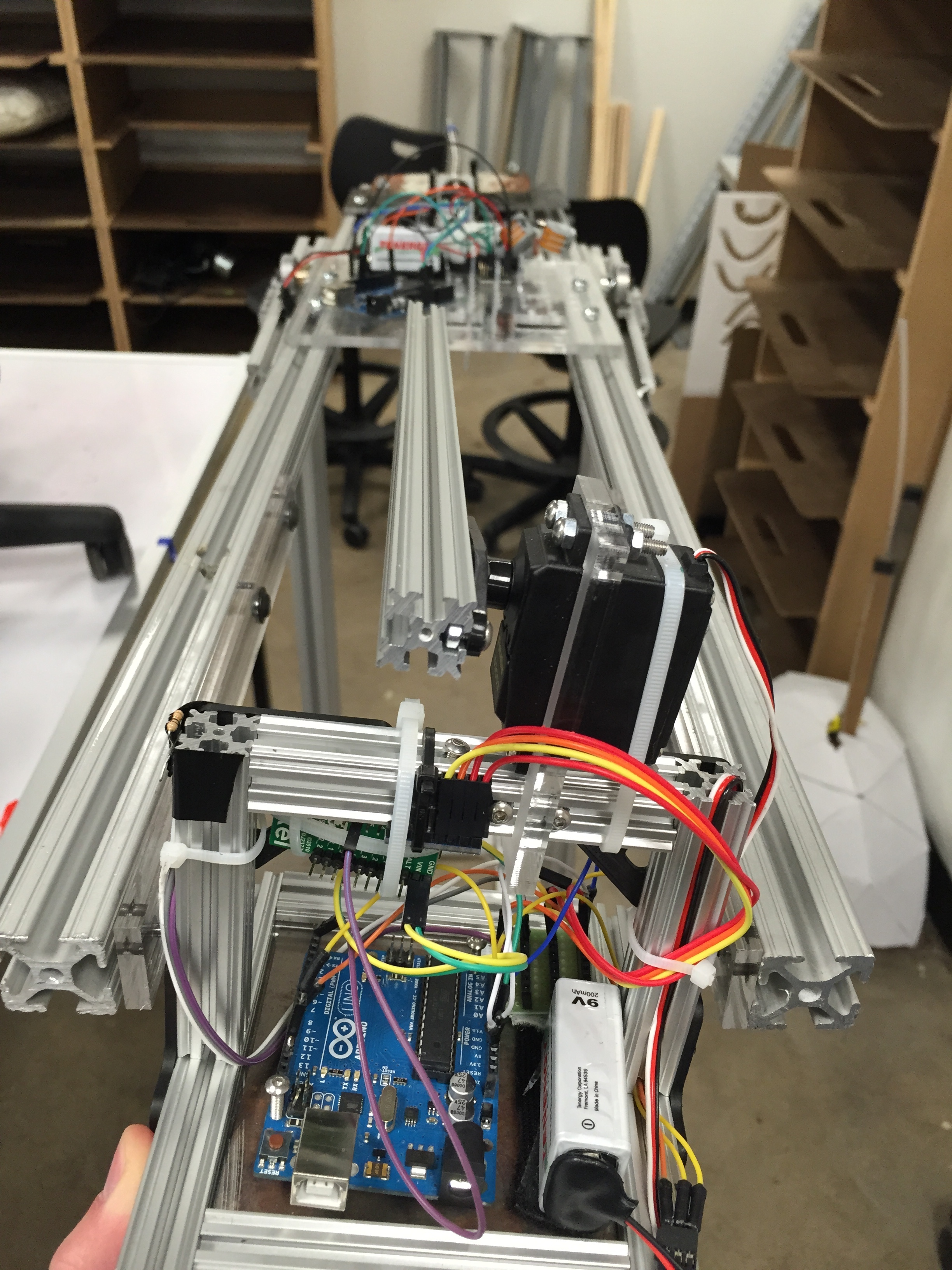
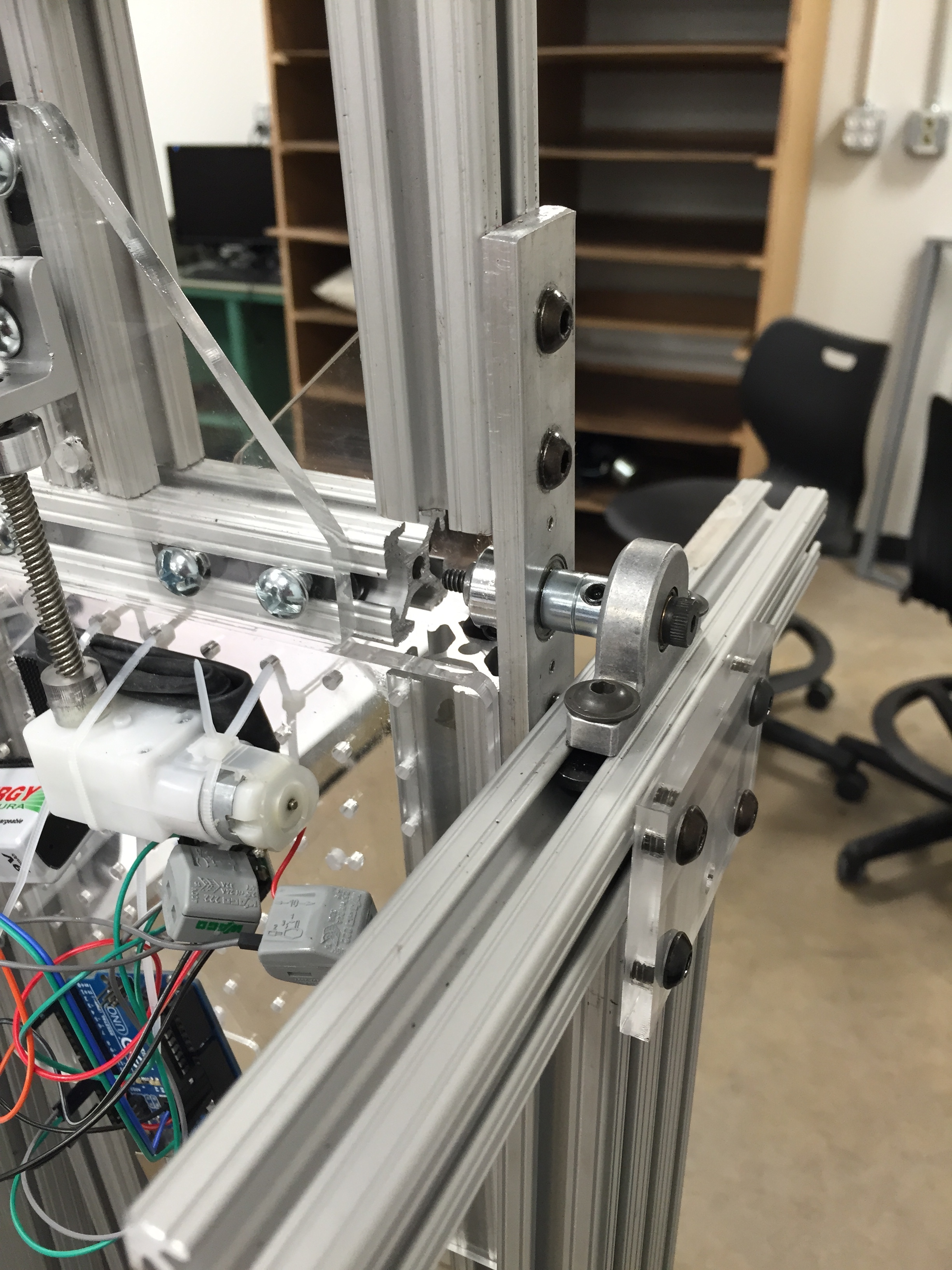
Group Members: Brian Yang and Luke Hottinger IntroductionAcrobotic gives you the power of telekinesis as you control a full size acrobatic robot using your own body movements. The robot tracks your movements using a Microsoft Kinect v2 and then uses that data to dance and sway with you. With specific hand gestures and the sway of your body, you can control how Acrobotic moves. You can try to rotate it as fast as you can or try to balance it – its your choice. The best part: you can do all of this without even touching the robot. Our previous flipping robots had a very interesting behavior that was very difficult to interact with. As it flipped you were compelled to touch it and play with it, however, it proved difficult as there was no real way to. With Acrobotic, you are able to interact with this intriguing motion without actually touching it. VideoTechnical NotesAcrobotic is constructed out of beams of 80/20 extruded aluminum and stands roughly four and a half feet tall at rest. A smaller robot is mounted on one of its arms and is able to rotate and flip independently of the rest of the structure. The main structure’s rotation is controlled by a mass of plate steel that is able to move towards and away from the axis of rotation. As the mass passes the center of balance, it is able to move in either direction. The structure’s motion is controlled wirelessly from a computer with a Kinect sensor. The Kinect tracks the Y coordinate of the person’s shoulders and is able to infer the level of the person’s sway. Holding two fingers on your left hand extends the mass away from the center while two fingers held up on the right hand pulls it in closer to the center. Two arduinos are required – one for each independent body of rotation. The wireless data is streamed from the Kinect through a computer to two Wixel modules – one for each axis of rotation. Images
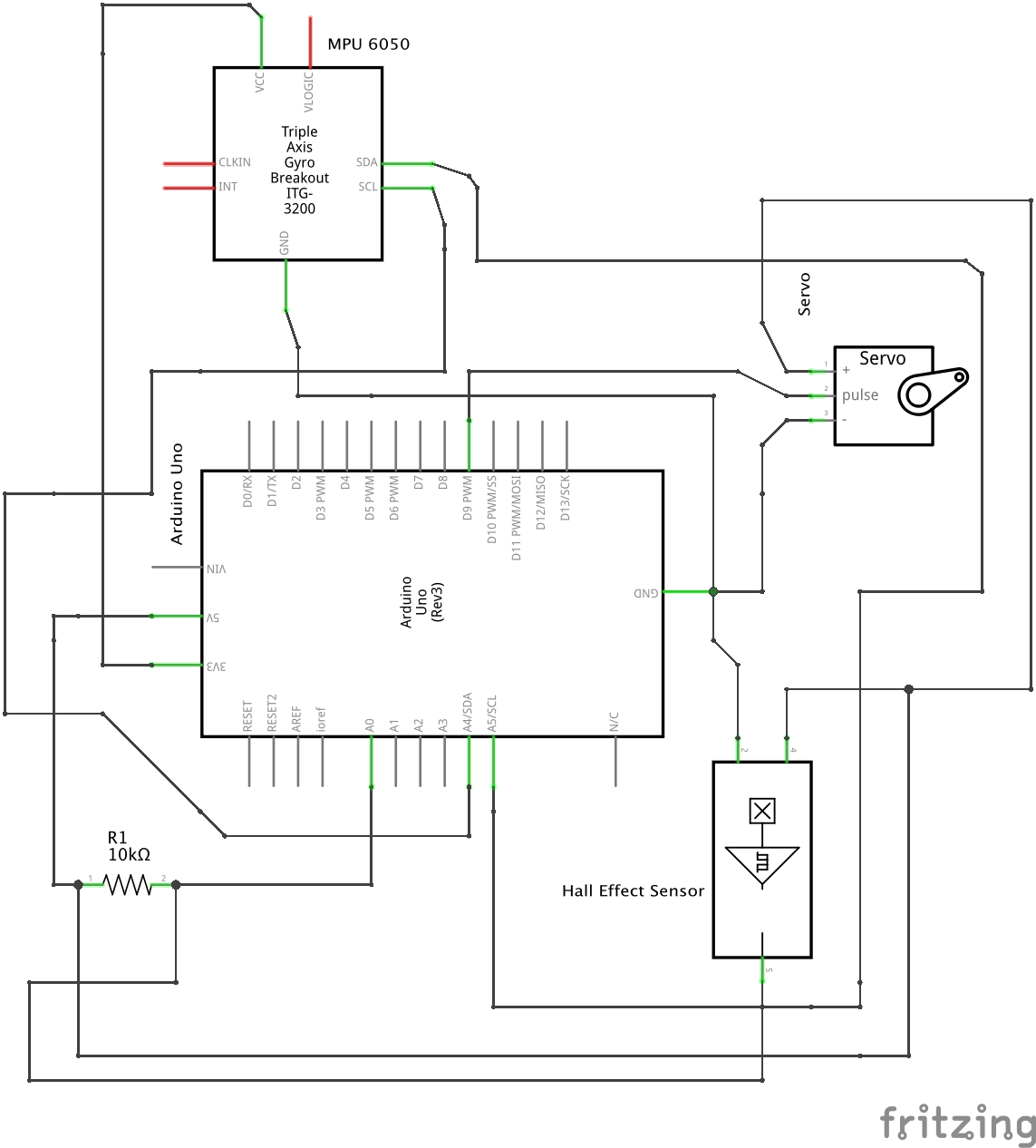
Schematic and CodeIndependent Rotating Robot Independent Rotating Robot Arduino Source |