Autonomous Robot Part 2 – Drawingbot
|
Group Members: Aditi Sarkar, Alice Borie, Claire Hentschker Designer: Aditi Sarkar, Integrator: Claire Hentschker, Tutor and Scribe: Alice Borie IntroductionWe wanted to create an autonomous drawing robot that altered its drawing in response to lines it had already created. To do so, we created a box on wheels with an arm that made marks on the table with a dry erase marker. There was a sensor at the tip of the marker, and when it sensed a line had been made in that area, it reversed its own direction temporarily in order to change the pattern being drawn.
Video
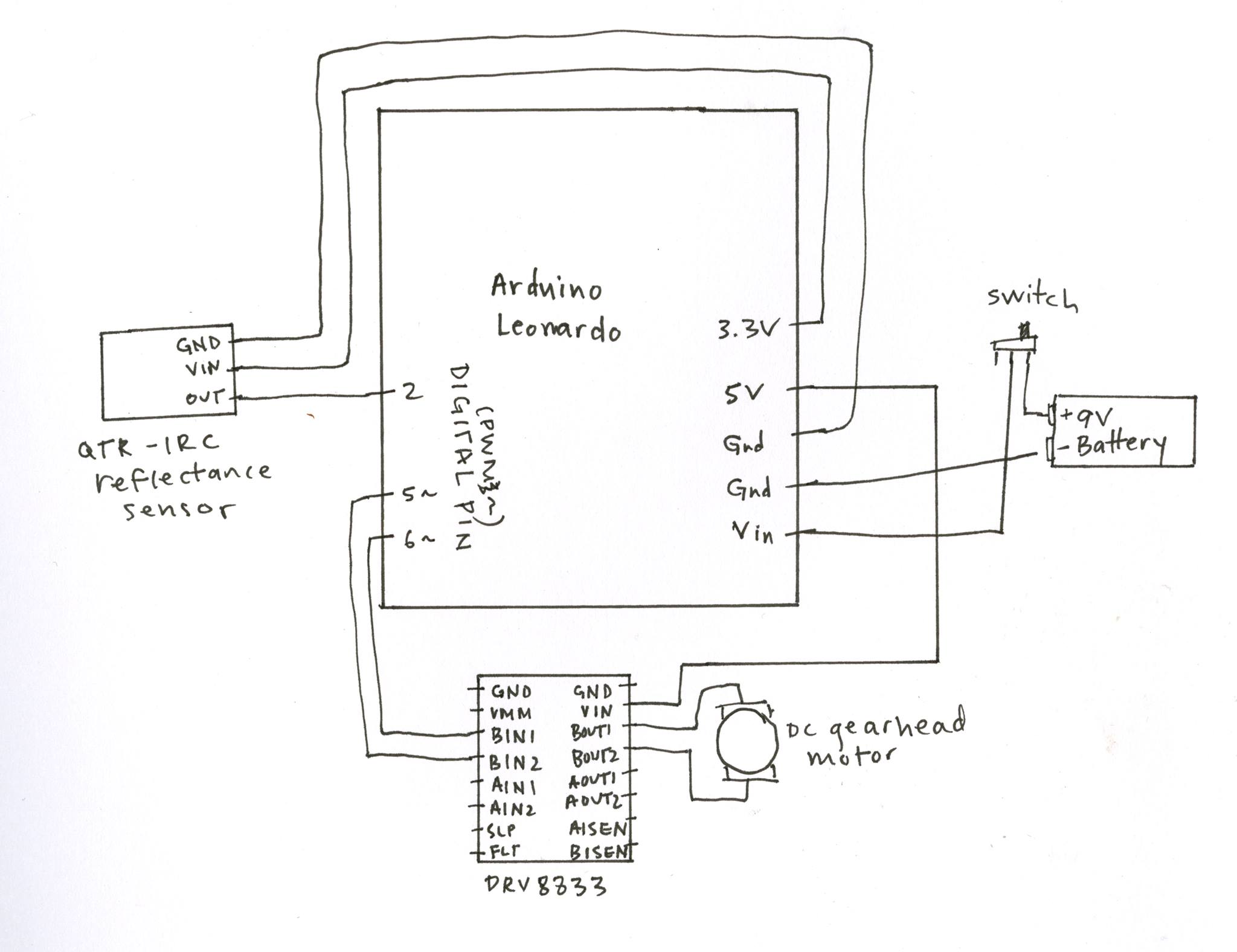
Technical NotesTechnical details: We used one gearhead motor, used with the DRV8833 motor driver on the arduino’s pwm pins to control direction. We also used the QTR-1RC reflectance sensor to check whether the bot passes over a place it has already drawn. The arduino code can be found here: https://github.com/aditisar/drawingbot/blob/master/drawingbot/drawingbot.ino Fabrication details: We used Rhino to model the box and the arm. We used colorful acrylic, which gave it a toy like appearance and used zip ties to hold the motor to the box. We used shaft collars on the hinge of the arm and screwed the arm onto the motor.
|