Autonomous Robot Part 3 – Waddle
|
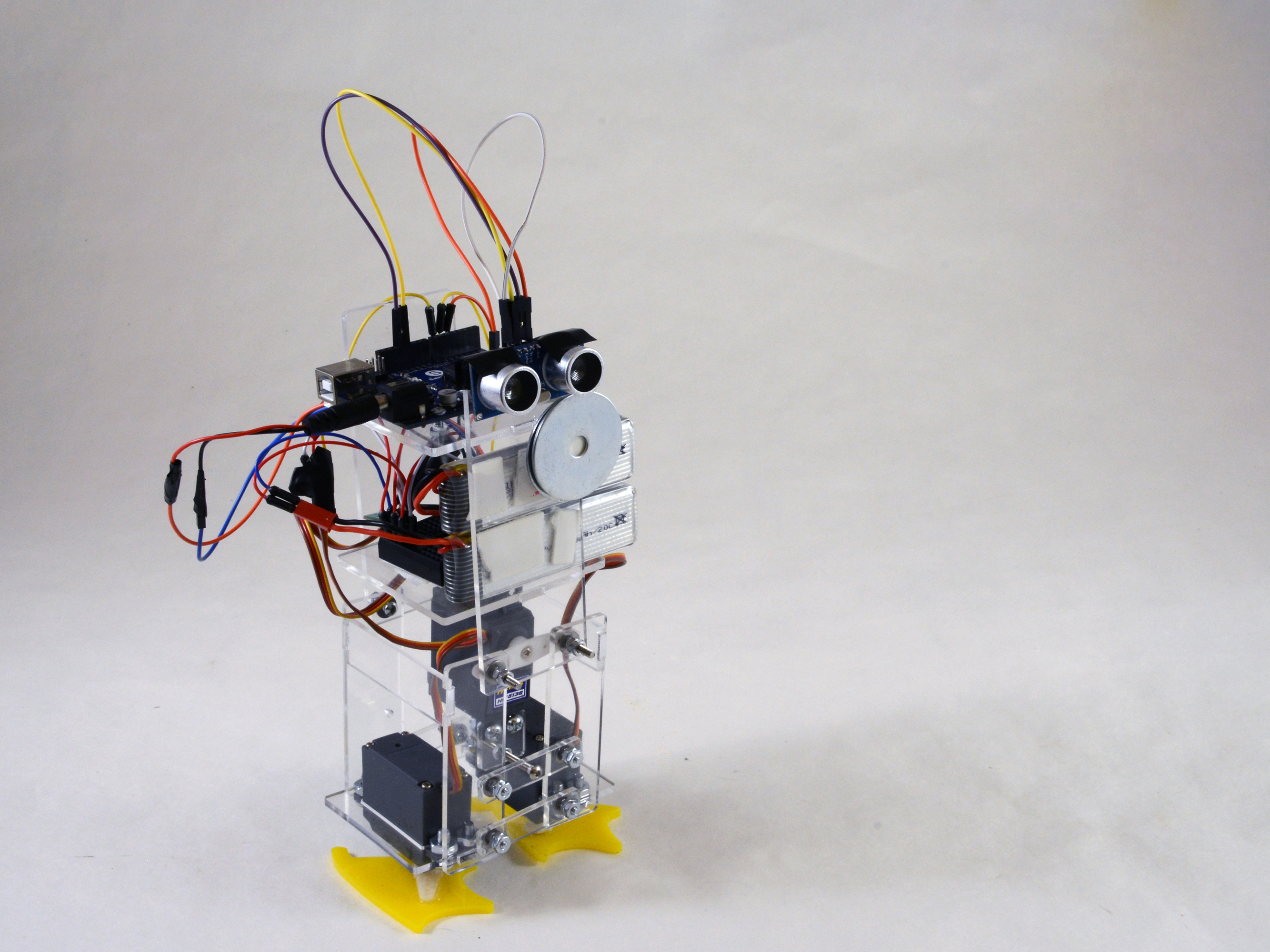
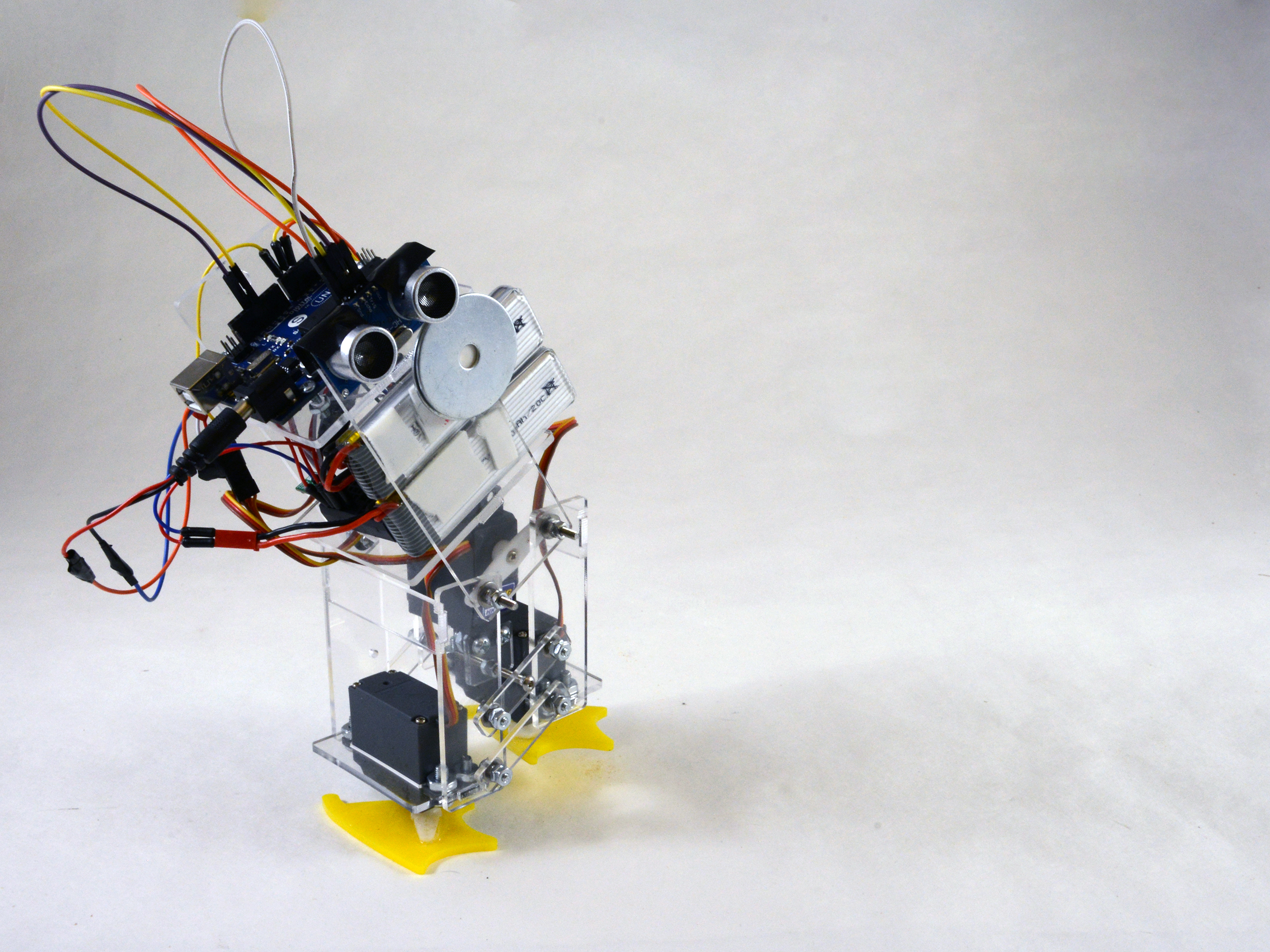
Vivian Qiu – Scribe, Jake – Designer, Myles – Tutor Introduction Waddle is a robot that explores the idea of an autonomous entity with an inherent personality achieved through different behaviors triggered by a variety of stimuli. Originally intended to embody an anthropomorphic form, Waddle evolved to a quirky robot with movements reminiscent of a duck. After exploring the wide range of potential behaviors achieved through the design of the robot, we decided to match the robot’s movement to its lovability. As a result, Waddle is a waddling robot that effectively navigates around obstacles. Fabrication Design The robot’s mechanical structure is adapted from an online video. Waddle has been adapted to have a completely redesigned frame to achieve a wider range of motion, durability, and precision, but most importantly an entertaining and identifiable behavior. This personality is achieved through sensing two types of stimulus with proximity sensors and sound sensors. In this iteration, Waddle exhibits an engaging reaction to music or sound, while navigating throughout its environment to avoid collision. Waddle’s mechanical structure is a refined result of three completed prototypes that led to a final design with the most mobility as well as smoothest range of motion in both its gait and its dance. Challenges in previous iterations include finding the correct counterweight to counteract the robot’s constantly shifting center of gravity from step to step, maintaining the structural rigidity in parts of the frame while allowing for movement in others, packaging electronics without interfering with the robot’s movement, and finding appropriate mounting mechanisms. This final iteration shows a further improved structure that allows for a wider span for the balance servo to move, allowing the feet of the robot a larger distance to move up and down. Consequently, Waddle moves with more stability and does not require as much finesse in its counterweights. Technical Notes The technical aspects of this project can be addressed in two aspects: the hardware and software components. To detail the former, three servos were utilized, two that act as the left and right feet and the third as a balancing mechanism. An Arduino Uno was utilized as the microprocessor along with two sensors, a sound sensor and a distance sensor. A mini protoboard was utilized to connect the power to the servos and sensor. The main power source for this iteration was a USB due to complications in battery powering, which will be solved by the next deliverable. On the software side, the algorithm for walking was heavily adjusted through design and many tweaks, which this class is referring to as iterations, to account for the new fabrication of Waddle. The walking formula is significantly different from the first iteration. The servos were distanced to offer a wider range of motion, which created instability in the middle, balance servo. This was combatted with a piece of acrylic bolted to said servo and the connection between the left and right foot servos. Additionally, a distance sensor was implemented to allow the robot to turn when in the presence of any obstruction that would prevent it from moving forward. To respond to music or other audio stimuli, sound sensors would prompt Waddle to dance when engaged. Whenever sound levels surpass a certain threshold, Waddle will trigger a dancing sequence. However, the use of a sound sensor proved to be difficult in the presence of the other components of the circuit; Implementing the sound sensor would require a complete redesign of the established circuitry. This is because the sound sensor would result in the robot drawing more than 500 milliamps, which is more than the step ups were able to manage.
|