Menu Close
© 2024 16-223 Work.
Powered by WordPress.
Theme by Anders Norén.
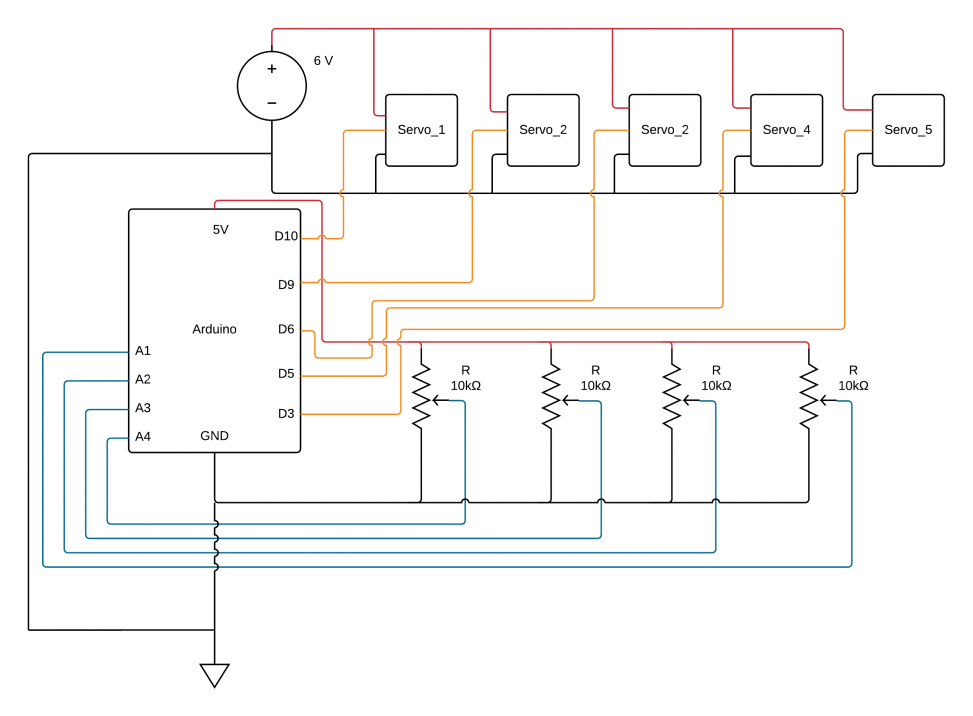
The circuit diagram for the robot arm and the stations controlling the arm.
You must be logged in to post a comment.
Leave a Reply
You must be logged in to post a comment.