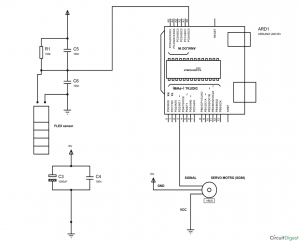
Using a very similar circuit to the one pictured above, the degrees of variation in movement on the flex sensor controls the rotation of the servo. The connection between the two components is made through the use of the A0 analog pin, where the input value from the sensor in the analog pin is translated into a digital value that then corresponds to movement in the servo between 0-180 degrees.
A real world application of this concept can be seen through the use of any sort of console that controls realtime movement of the hand (ex. video game console, remote control cars).
Leave a Reply
You must be logged in to post a comment.