Magnetic RC Cars
Justin Kufro & Oshada Gunasekara
Narrative Description
This project strives to create wonder in its users and spectators by allowing remote controlled cars drive along a three-dimensionally complex track, defying gravity (using magnets). Cars will be able to drive normally, sideways, and even upside down as they race for the finish line. Visitors will be encouraged to drive one of the two cars, and even modify the specific route of the track using whiteboard markers. The main success scenario for this project is for visitors to have a sense of delight as they watch the cars weave through the obstacles that they (or others) create.
Technical Outline
There are three components of the project: the course, the cars, and the controllers. We want to make two sets of cars and controllers.
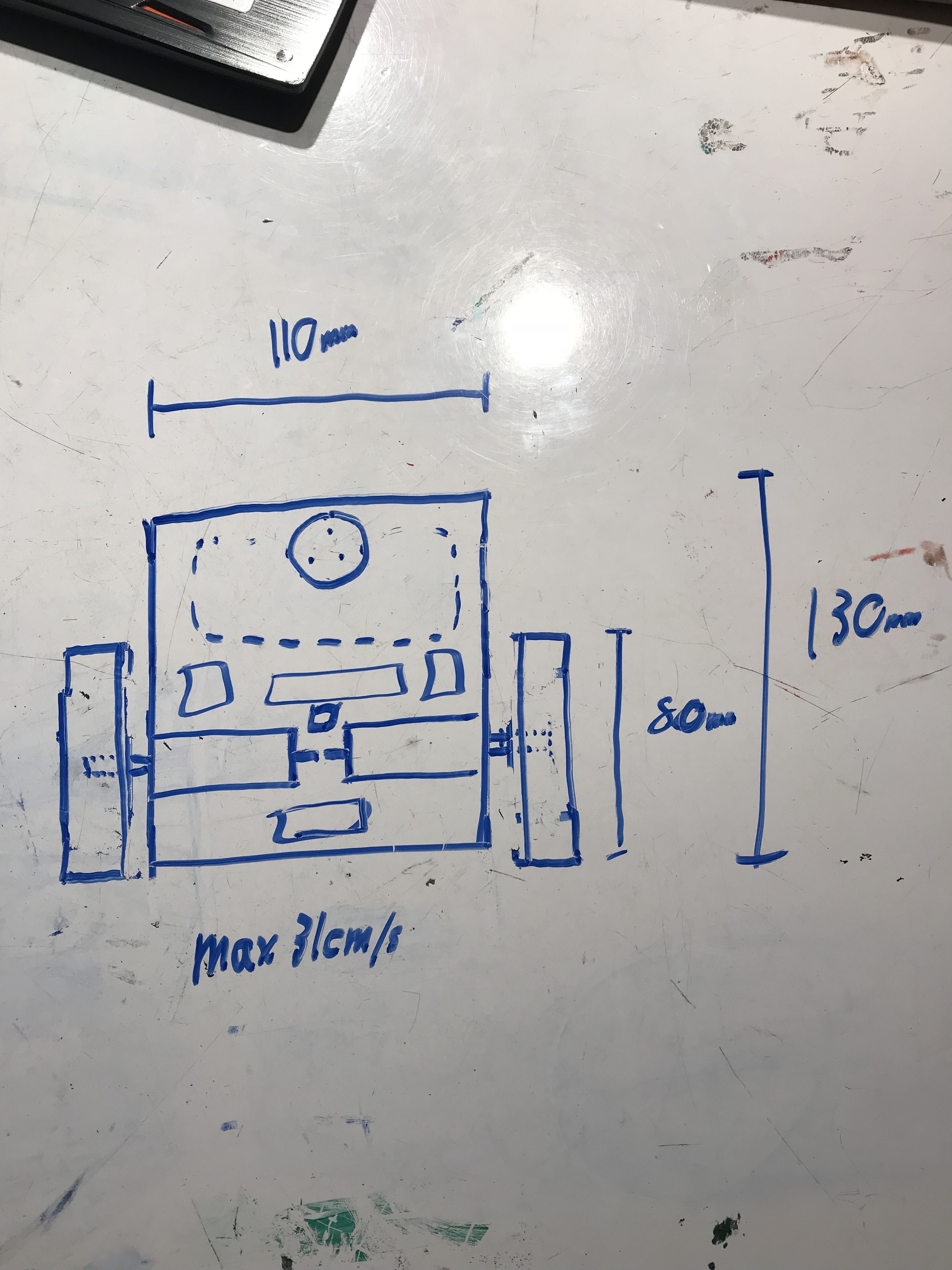
The cars will use two DC motors & motor controllers, a battery, RF transceiver, encoders, and an arduino micro. For construction cars will use 80mm wheels, a ball caster, plywood/abs plastic, permanent magnets, and foam for bumpers.
The controllers will use an analog two-axis joystick, a AA battery back, and arduino uno. Construction will be out of plywood, and possibly foam for looks and comfort. Controllers should be attached to the track using string. This helps avoid controllers getting lost or accidentally taken by visitors.
The track will be made primarily out of plywood for structure. We will have thin whiteboard material laid throughout the entire track, with stainless steel shim stock inlay for sideways and upside-down portions.
The key technical challenge will be getting the cars to drive upside-down. To mitigate this risk we are planning on doing preliminary testing, as well as making the design modular in its magnet configurations.
Timeline
Project Management
Testing effectiveness of permanent magnets on shim stock.
As tasks start on the timeline both of us will meet and claim/negotiate responsibilities. This will be done on a weekly basis at a minimum.
The first on-site test objectives are:
- have functional car & controller. (this is MVP)
- track completeness not required, but desired.
- be in the garage room
The contingency plan if the magnets are not effective enough is to make the track (and possibly cars) modular. Car modifications would ideally just be decorative pieces made of foam or paper.
Budget Outline
Sketches

Leave a Reply
You must be logged in to post a comment.