Here’s a quick run-through of my “Rocking and Rolling” demo:
My project tries to create a satisfying rhythm through very consistent motion. By using a circular body, the timing of the roll is a lot less situational than an ellipsoid.
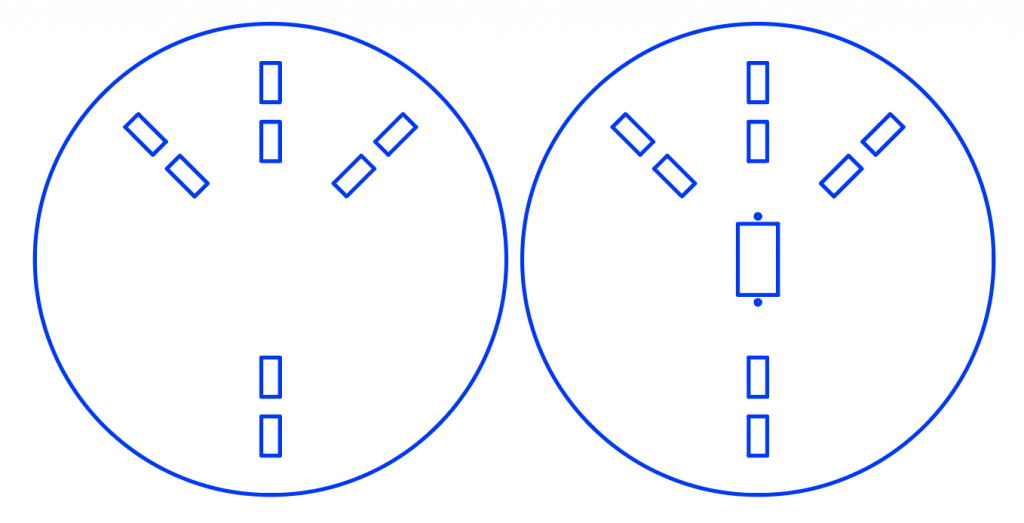
The faceplates link together in 4 places to keep the project fixed, however in the two-thirds of the faceplates without bracing, there is a two-sided arm piece that acts as the kicking mechanism.
This kicking mechanism mounts to the servo horn such that it can be quickly rotated with one side providing the motion while the other side catches the motion and propels it back.
In this way, the rhythm is as follows: kick – rest – catch – kick… repeating with the servo kicking at 1.15 second intervals seen in the code below
#include <Servo.h>
Servo hobbyServo;
void setup()
{
hobbyServo.attach(9);
}
void loop()
{
//165 Max Right
//150 degrees is center
//110 Min Left
hobbyServo.write(155);
delay(1150);
hobbyServo.write(115);
delay(1150);
}
Leave a Reply
You must be logged in to post a comment.