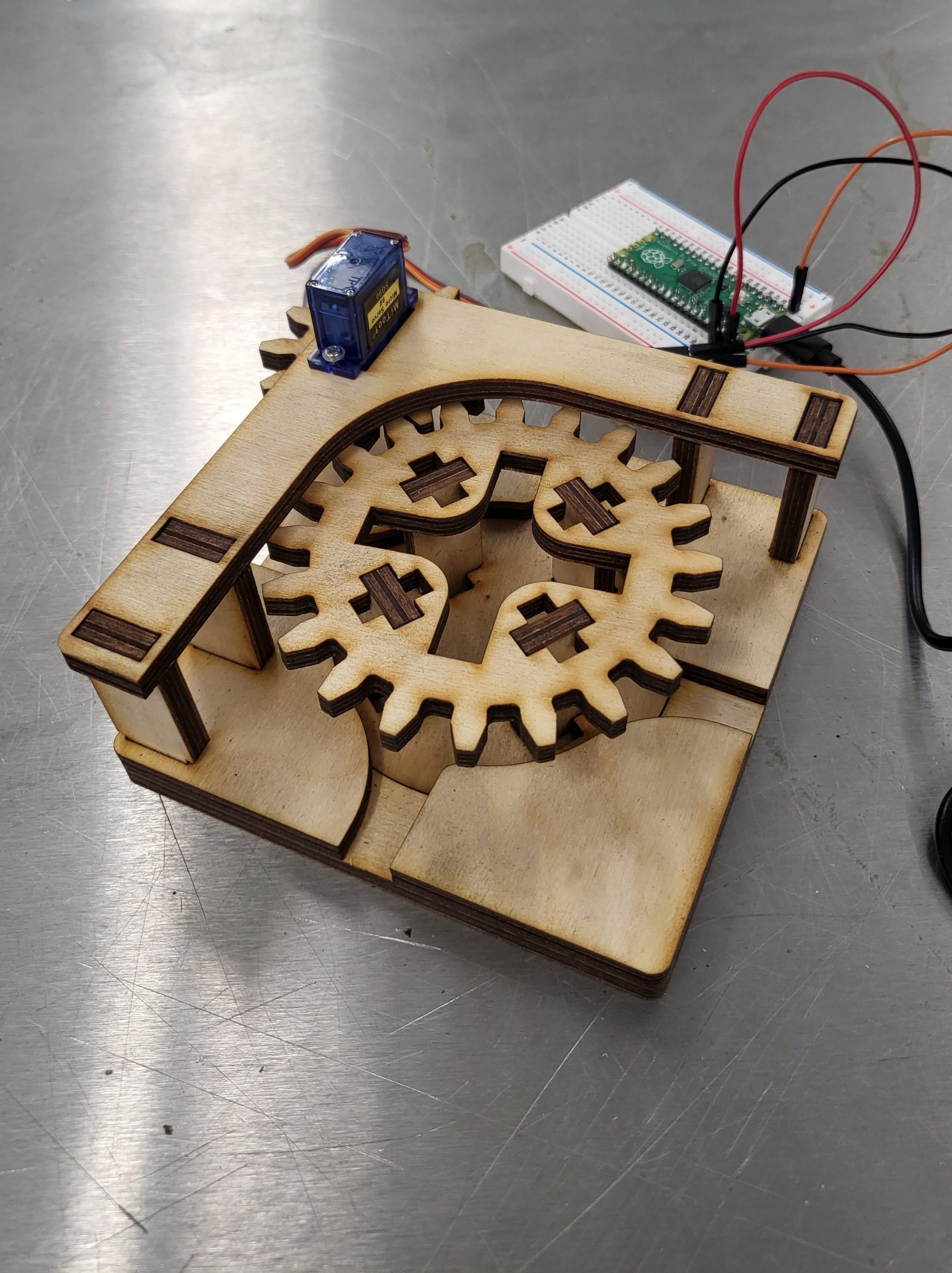
I created a Roundabout/Merry-go-round using gears. I connected the servo’s horn with the small gear that would rotate and turn the big gear. There are columns/tabs connected to the big gear that would hit the marbles and send them in different directions. The tabs can be attached to the gear horizontally or vertically. The hole in the big gear can be another entrance for the marbles. The Roundabout moves back and forth slightly in the beginning and then moves fast in both counter clockwise and clockwise directions for a few seconds. The gears don’t work unless they spin fast, so I could not include slow motions. Instead, I added a brief pause in between the fast rotations. I believe this error is caused by the friction between components and the distance between the gears. https://youtu.be/X7_1UDlwLZ4
print("Creating roundabout object.")
roundabout = Roundabout(board.GP0)
print("Starting Roundabout")
while True:
# initial pause
time.sleep(1.0)
print("Back and Forth")
accelerating_rotation(roundabout, 0, 60.0, duration=4)
accelerating_rotation(roundabout, 180.0, 0, duration=5)
accelerating_rotation(roundabout, 0, 60.0, duration=6)
print("Fast Accelerating Rotation 1")
accelerating_rotation(roundabout, 180.0, q=0, qd=400, b=0.3, duration=8.0)
print("Roundabout paused")
time.sleep(1)
print("Fast Accelerating Rotation 2")
accelerating_rotation(roundabout, 100.0, q=0, qd=300, b=0.3, duration=5.0)
print("Roundabout paused")
time.sleep(1)
Leave a Reply
You must be logged in to post a comment.