Project: Megaslide
Abstract
Our main goal was to develop a large interactive marble run that would capture and maintain the attention of young children at the local school for a long period of time. This particular project was designed with the intention of being large in scale, composed of multiple modular paths, and various kinetic elements that helped guide or capture the marbles in the slide. Our hope was that the children would greet our Megaslide with enthusiasm, excitement, and leave with a newfound opportunity to explore and interact with the kinetic and structural mechanisms while strengthening their estimation and prediction skills. The Megaslide experienced several ideation revisions and structural reconstructions through initial testing at the Children’s school and in class critiques.
Objectives
The overall goal was to design a slide that could maintain the children’s attention for a longer period of time than an average game/slide iteration. After the first interaction with the children’s school, our team had realized that our initial Megaslide design was too bulky for transport, unintuitive, lacked movement, and had ramps that were too steep. For the slide’s redesign, our team wanted to emphasize the parts that the children loved: simplicity, intuitive interaction, mass marbles, speed, large scale, running after the marbles, and movement.
Regarding kinetic aspects, our team had gone through multiple iterations of the basketball hoop for the Childen’s school, and we ended up putting it next to the slide as it didn’t work as intended. Our team’s goal for kinetic aspects was to get them working well and integrate them more into the slide as a way to transport the marbles through the tunnels.
Implementation
Throughout the entire project, our designs drastically changed and went through multiple revisions. Each of our kinetic pieces went through an incredible amount of design iterations and revisions ranging from multiple problems, and in the end, never quite worked how we intended.
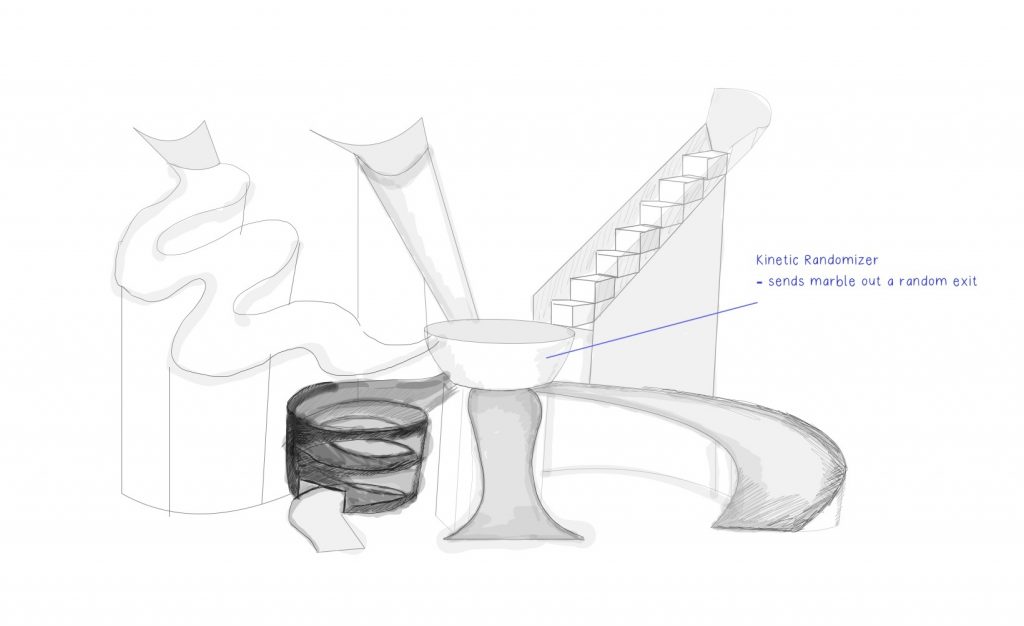
Initial Slide Design
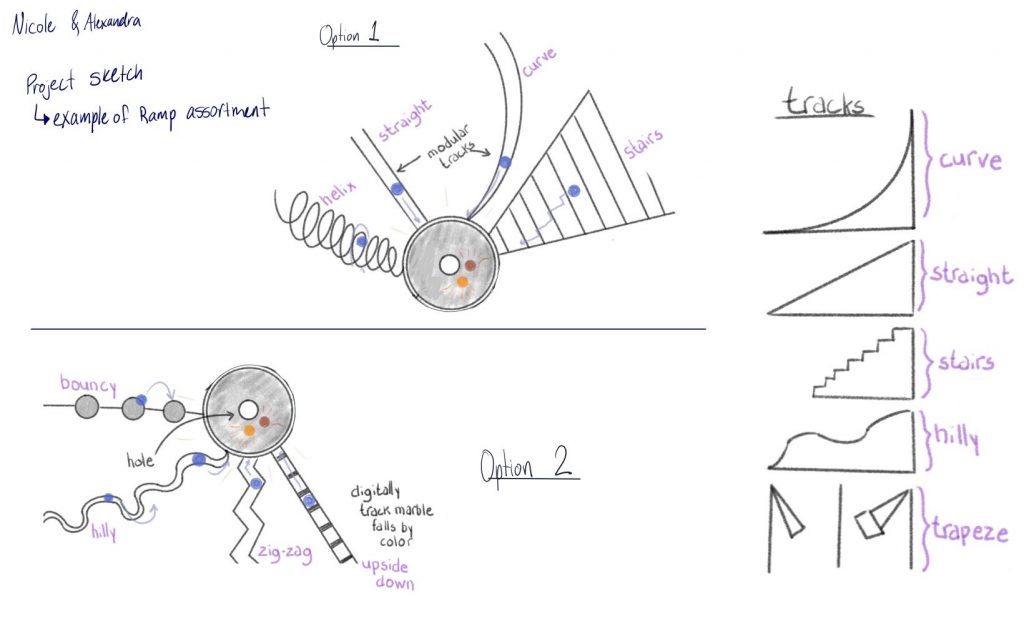
First Kinetic Ideation – 1st Demo for the Children’s School
Initially, we intended to create a self-playing basketball game, with the potential for interaction with children. This particular machine aimed to implement a motorized slingshot that would shoot the marble towards the hoop. Our slingshot never worked, so to involve some sort of movement for the children’s school, our team altered the motor into a revolving spinning motion. The children positively interacted with the motor for a short period of time and were happy to run after their marbles until they got bored and realized the piece didn’t give them their desired results. The visual interaction seen between the children and the piece strongly indicated that our team needed to rethink our kinetic pieces.

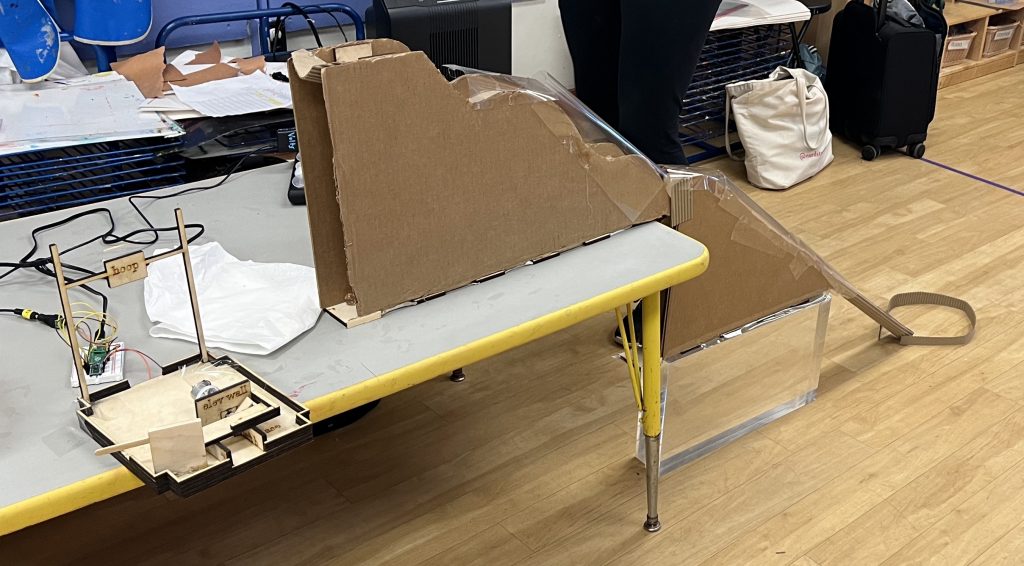
Final Slide Design
Our final design iteration had included all our initial observations and positive aspects that the children truly gravitated towards: simplicity, intuitive interaction, mass marbles, speed, large scale, running after the marbles, and movement. Our team also added the special element of prediction and estimation through surprise tunnels and holes causing marbles to unexpectedly switch paths.
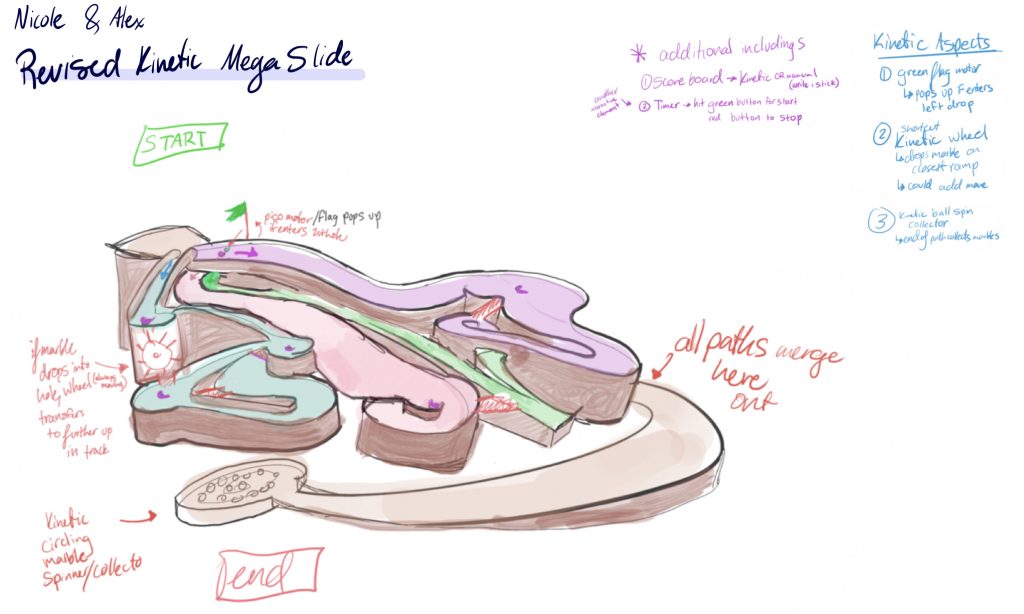

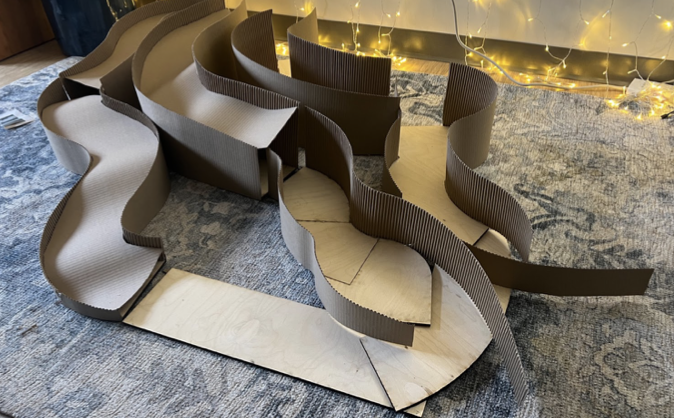
(Original was scaled too large, so parts were rearranged – shown here)

Final Kinetic Ideations
Since our team overhauled our design so close to the final demo, we felt that we had to be realistic in the pieces we would be able to create, which ultimately limited the pieces we created and how we created them because we needed them to work whether mechanical or motorized. The final kinetic pieces we constructed were a spinning ball collector, a vertical wheel, and a bouncy platform.
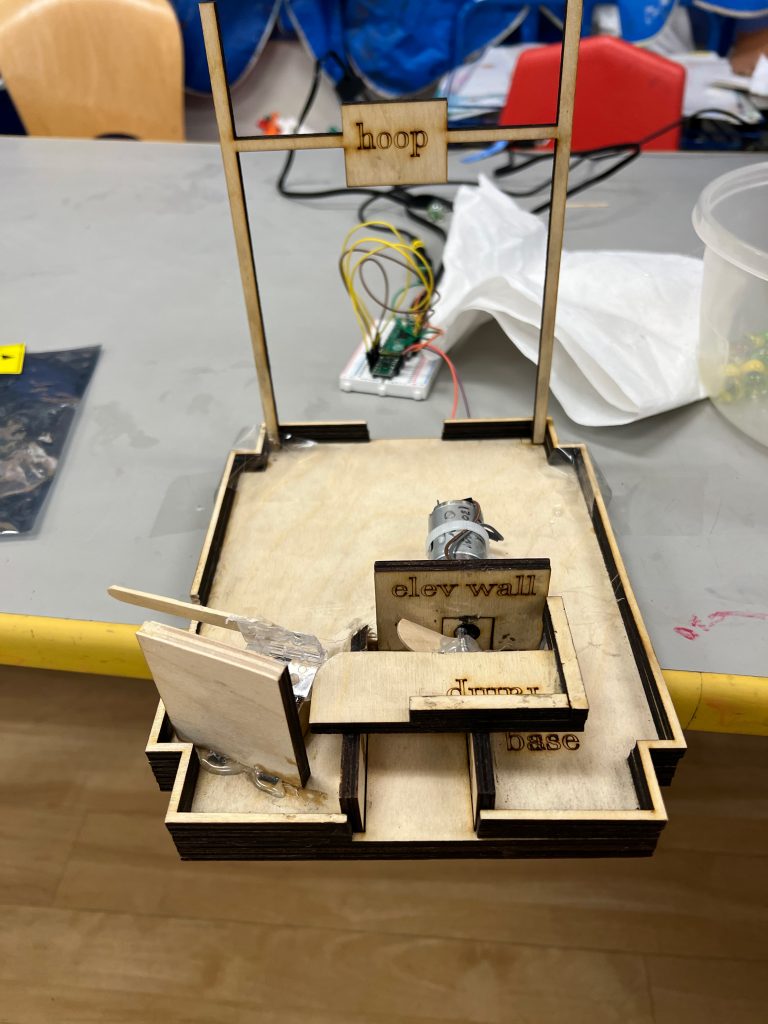
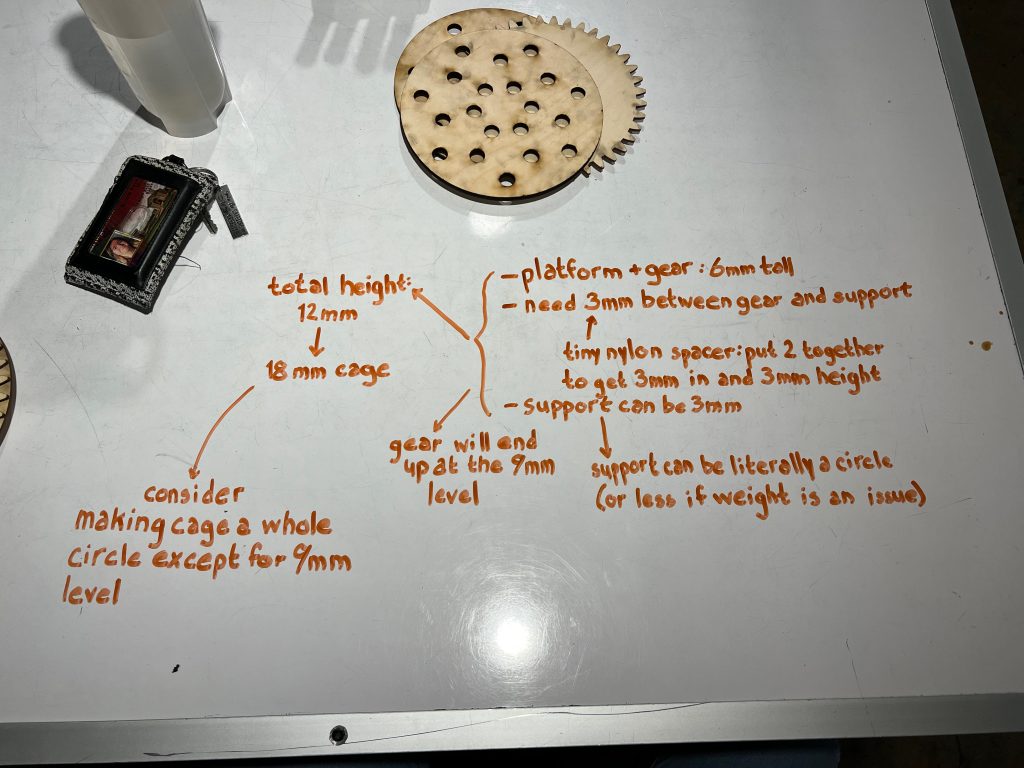
Marble Collector
On our initial slide design, the ramps were too steep causing the marbles to accelerate off the ramp towards the other end of the room. This not only created a safety hazard of children/teachers tripping or falling down due to the rampant marbles, it makes it difficult to find the lost marbles. The teachers at the Children’s School ended up helping us create a barrier that would stop the marbles from going too far. The children loved running after and collecting the marbles, and our team wanted to maintain a bit of this simple joy the children experienced. Our team aimed to develop a kinetic marble collector that would help us maintain the marbles and keep track of them all, but kept it towards the bottom of the slide, so the children would have to continue transporting them back to the starting point.
Bouncy Platform
This particular marble platform went through multiple iterations and none of them quite worked as we hoped. Our team had planned for this marble platform to act as a transportation path between tunnels, but had accidentally scaled it just slightly too big for the area it had intended to be located. Our team decided to stick this particular platform in the beginning of the slide instead.


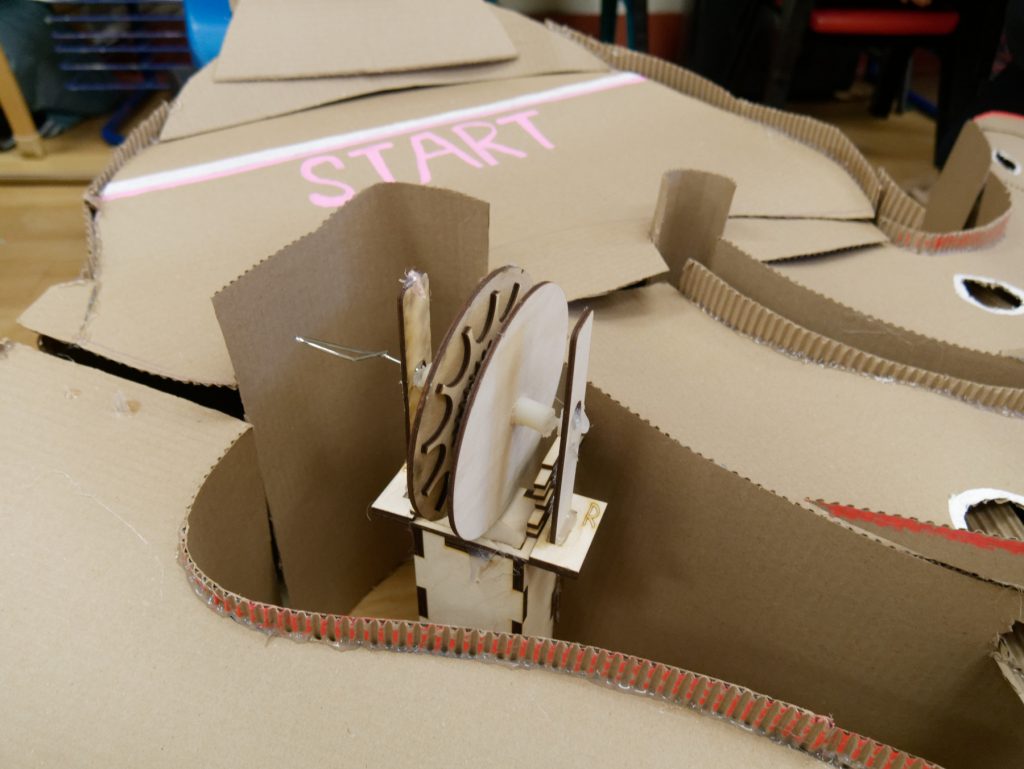
Elevator/Wheel
Our team developed the elevator/wheel as a way to transport marbles from one tunnel path to another. We had been working to including a motor, but this piece became mechanical as the motor had not working as we hoped.

Outcomes
The slide garnered the most enthusiastic response from children with many jumping or screaming with excitement, even with some students needing to be dragged away from the slide so other children could have more time at the slide. The students loved the hole and tunnel aspect with some children specifically placing marbles in each hole to find where they exited. Our team had expected more students to want to use the slide as a mode of competition between all the marbles. Since there were many “dead” areas where the marbles got stuck, our team observed that the children were more focused on getting the marbles to reach the “finish line” and which path could get them there the fastest.
The favorite kinetic piece amongst the children was the collector. Most students enjoyed seeing the balls spin around and enjoyed grabbing marbles from their place on the collector. There were many students who were only fascinated by the collector and chose to spend their time placing every marble in each hole on the collector.
For the vertical elevator, the kids did initially seem to be interested in this piece, however they struggled to understand how it worked. The piece ended up being broken early on during the showcase, which made it difficult to see how other students interacted with the kinetic mode.
As for the bouncing platform, the children didn’t really know what to do with this piece. They tried dropping the marbles into the piece, but didn’t catch on to the fact that they were meant to move the pieces with the strings. In the end, they ended up ignoring this piece.
Future Work
In the future, our team believes that our kinetic pieces needed to be simplified. We always created a piece by developing a goal or a specific form of interaction we hoped to develop, and sometimes the ideas were slightly too ambitious, never quite working out how we hoped even after multiple iterations. Our team also would hope to create even more interaction between the kinetic pieces and slide where they were more integrated with one another.
During final critique, someone had mentioned implementing kinetic pieces that worked as a stopper or slows down other marbles on various paths to make it more of a competition. This is a really interesting idea for a more competitive slide, and our team would love to explore this aspect further.
In regards to the slide, the main revision for a future work would be to better design the slide and ramps so that there weren’t as many dead areas where the marbles would get stuck. Our original plywood print out was scaled too large and we had to heavily revise the base outline with the pieces we had. The pieces worked well together, but caused some difficulties in terms of the overall smoothness of our slide causing dead areas and uneven entrances/exits for the marble. In addition, the slide had to developed in pieces for easy transportation and if we could create one full slide that wasn’t in pieces, that would be fantastic.
Design Documentation
1-2 Minute Video Demonstration (Kinetic Videos Shown Above)
Solidworks and Python Files
import math, time
import board
import pwmio
def servo_write(servo, angle, pulse_rate=50, debug=False):
pulse_width = 0.001 + angle * (0.001 / 180.0)
cycle_period = 1.0 / pulse_rate
duty_cycle = pulse_width / cycle_period
duty_fixed = int(2**16 * duty_cycle)
servo.duty_cycle = min(max(duty_fixed, 0), 65535)
# print some diagnostics to the console
if debug:
print(f"Driving servo to angle {angle}")
print(f" Pulse width {pulse_width} seconds")
print(f" Duty cycle {duty_cycle}")
print(f" Command value {servo.duty_cycle}\n")
#--------------------------------------------------------------------------------
def constantSpin(servo):
servo_write(servo, 0)
#--------------------------------------------------------------------------------
# constant spin servo
servo1 = pwmio.PWMOut(board.GP0, duty_cycle = 0, frequency = 50)
while True:
constantSpin(servo1)
time.sleep(.25)
Additional Images of Design/Production from Original Slideshow
https://docs.google.com/presentation/d/1ofk8OZU2hKioLtVvLoL_oHv8QUR8j9NiwZwvWWuMTXc/edit?usp=sharing
Leave a Reply
You must be logged in to post a comment.