Exercise: Mechanical Puppet¶
In this exercise we will design and fabricate a simple mechanical puppet. The overall project objective is enabling narrative movement for storytelling. The technical objectives are creating reliable mechanical freedoms and transmitting movement.
Objectives¶
The overall objective of this exercise is to design and fabricate a freestanding device which conveys a user gesture through mechanism to a puppet with one or more degrees of freedom.
The goals of this exercise are that you should be able to:
Design and fabricate an object which exhibits expressive movement, which we call a puppet.
Design a structure to support the puppet while allowing one or two degrees of freedom.
Use bearing components to implement low-friction joints.
Design a motion transmission to manually actuate the puppet via mechanism.
Design a multi-part assembly including joinery.
Laser-cut parts, assemble, test, and iterate.
Kinematic Design¶
A robust solution is to implement a single revolute joint which allows the puppet to rotate around an axis. An important decision is placing that axis, both in terms of direction and where it is positioned relative to the puppet center.
Linear or translational joints are also possible but trickier to implement robustly.
Spherical joints allow three degrees of freedom; we don’t stock related components, but low-precision spherical joints can be created using ad hoc loose fits.
Motion Transmission¶
There are several ways to consider transmitting movement.
Linkages. Four-bar linkages can convey motion, translate rotation into reciprocation or vice versa, and change motion scale.
Tension elements. Strings or cables can provide linear motion over long distances. Gravity or springs can provide counterforce to keep the lines in tension.
Gears. Rotary motion can be magnified or reduced and transmitted between parallel shafts via gears.
Cams. Revolving elements with complex shapes can encode trajectories and transfer them to linkages or push rods.
Sample Design¶
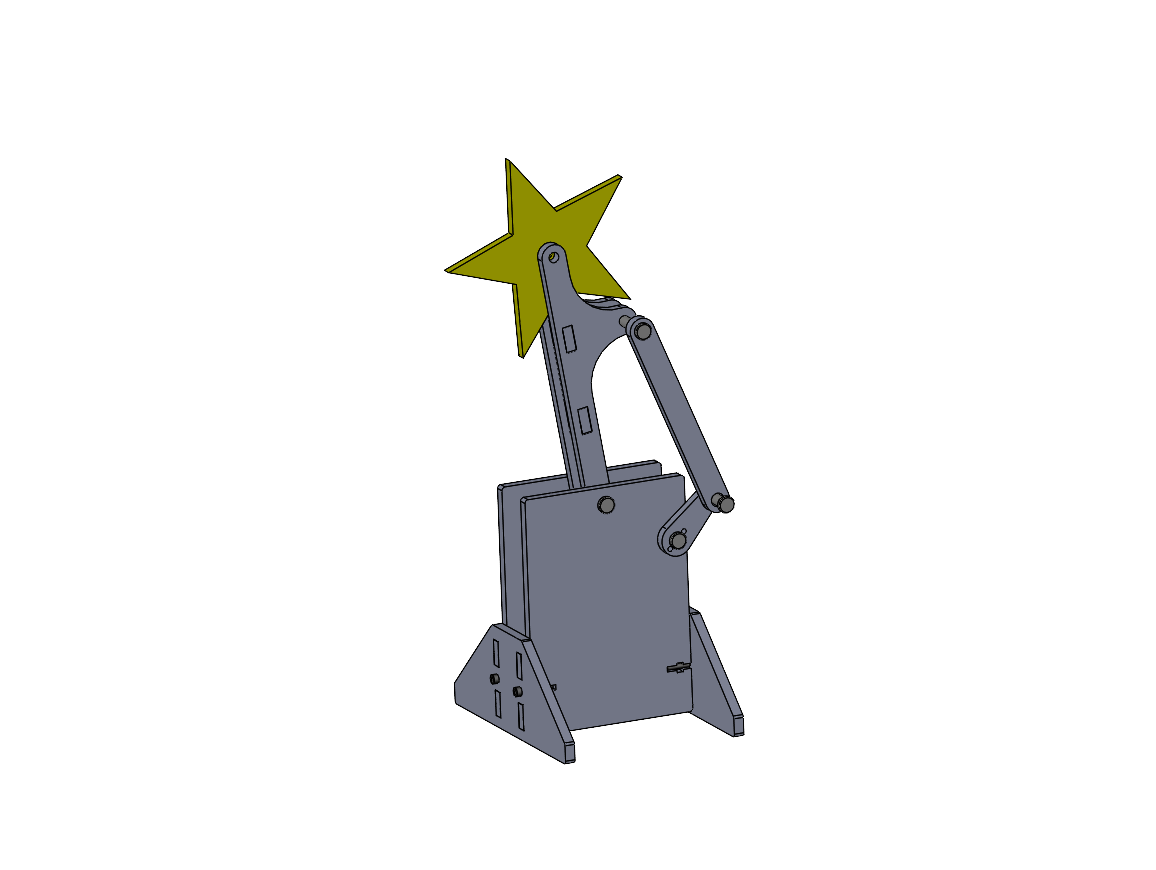
Example solution: a free-standing base with a four-bar linkage. The star is a proxy for a more elaborate puppet. The joints use bushings and clevis pins. One clevis pin also serves as a crank handle.¶
This sample solution for this exercise can be browsed on the course site:
Or as a single zip file:
Sample files are provided on the assumption that students will go farther given a stronger foundation, so these are provided for you to examine and use as starting points. But if you use one as a template, please be mindful that you add meaningful development, not just tweak it trivially.
Deliverables¶
Live in-class demo of your puppet.
A short report posted to the shared drive including:
a short text statement reviewing your intent and outcomes
one or more photos
a brief video
your SolidWorks files