Exercise: Motor Puppet¶
In this exercise we will design and fabricate a simple puppet driven by an electric DC gearmotor. The overall project objective is enabling narrative movement for storytelling. The technical objective is creating a reliable actuation scheme using a gearmotor.
Objectives¶
The overall objective of this exercise is to design and fabricate a freestanding device which actuates a puppet using a DC gearmotor. The autonomous performance of the puppet will then be controlled by manually controlling the electricity into the motor.
The goals of this exercise are that you should be able to:
Design and fabricate an object which exhibits expressive movement, which we call a puppet.
Design a structure to support the puppet while allowing one or two degrees of freedom.
Reliably mount a DC gearmotor in an assembly.
Design a motion transmission to couple motor shaft rotation to the puppet via mechanism.
Design a multi-part assembly including joinery.
Laser-cut parts, assemble, test, and iterate.
Gearmotors¶
A principal technical objective is gaining design experience with gearmotors. These actuators can provide continuous rotation in either direction at variable speed and are useful for energy input and motion control. In this exercise we are simply powering them for for constant rotation.
Please do not glue anything to your motor shafts. The Pololu 1997 hub is the most practical way to mount an element on the motor shaft. For mounting your element it features four M3 threaded holes on a half-inch diameter bolt circle (6.35 mm radius, 12.7 mm diameter). The M3 x 10 mm button-head cap screws are a good length for attaching 6 mm plywood to the hub.
Please note that unlike the hobby servos, gearmotors do not have any position sensing, so moving them to specific positions will require the use of additional sensing, usually in conjunction with microcontroller programming and a digital motor driver.
Sample Design¶
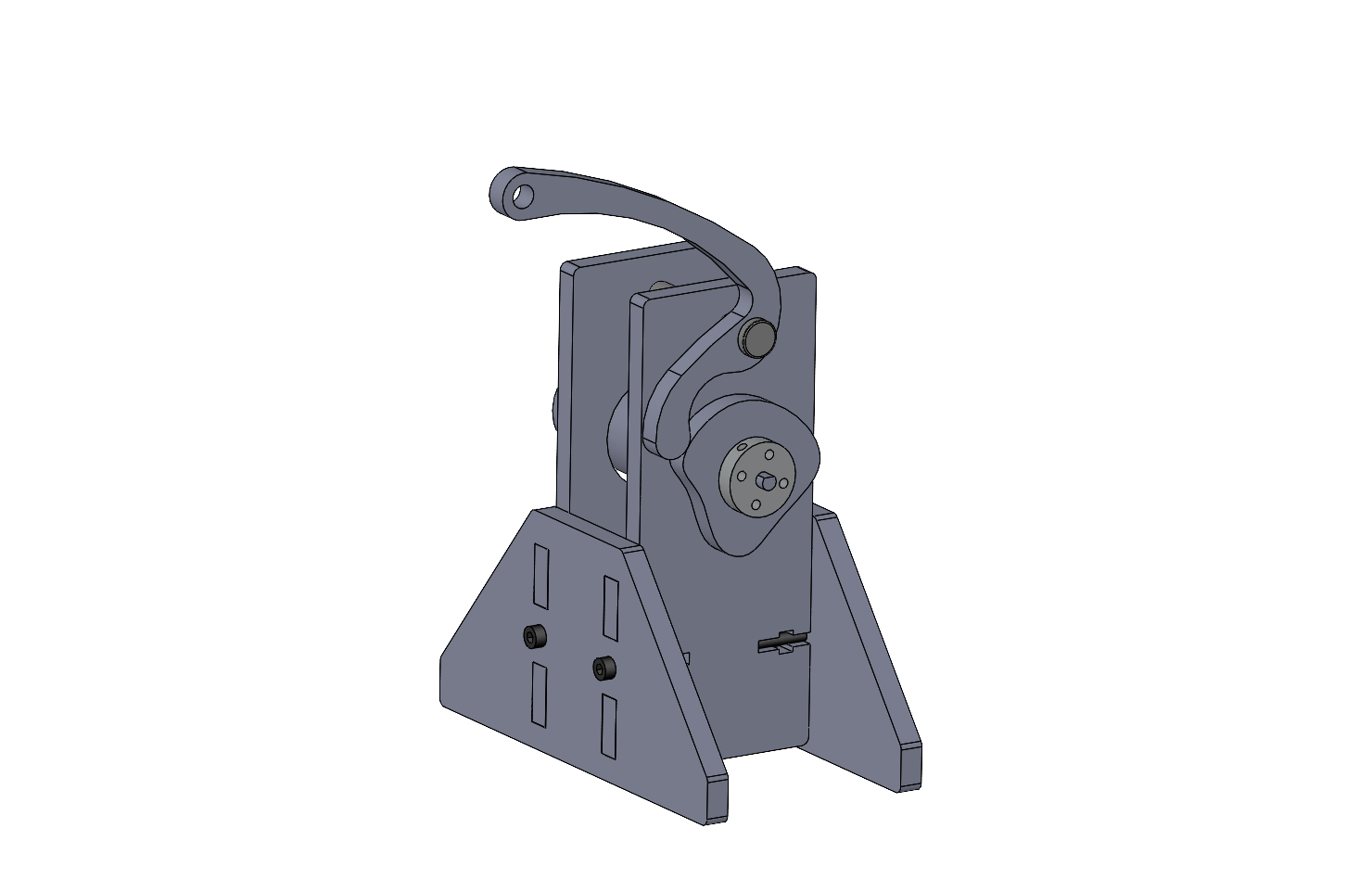
Example solution: motor-driven cam-actuated ‘fishing pole’.¶
The sample solution is built around a free-standing base and demonstrates the use of a cam to create a continuous pattern of motion over time. The puppet is not shown, but is a soft bouncy object suspended as ‘bait’. The cam follower is pressed against the cam using the weight of the puppet. As the motor rotates, the follower maintains contact with the cam and rotates back and forth around its own pivot. The pivot joint uses a press-fit clevis pin and a bushing pressed into the follower. The motor is face-mounted to the front vertical plate using two M3x10 screws, and the rear vertical plate has a clearance hole for the motor body.
Other solutions might use a linkage, gear train, tension lines, or direct drive to move the puppet. In all cases the Pololu 1997 hub should be used to connect to the motor shaft.
The lab stock includes gearmotors with different gear ratios which produce different unloaded speeds. The default is 130 RPM (revolutions per minute) but there some slower ones.
This sample solution for this exercise can be browsed on the course site:
Or as a single zip file:
Deliverables¶
Live in-class demo of your puppet.
A short report posted to the shared drive including:
a short text statement reviewing your intent and outcomes
one or more photos
a brief video
your SolidWorks files