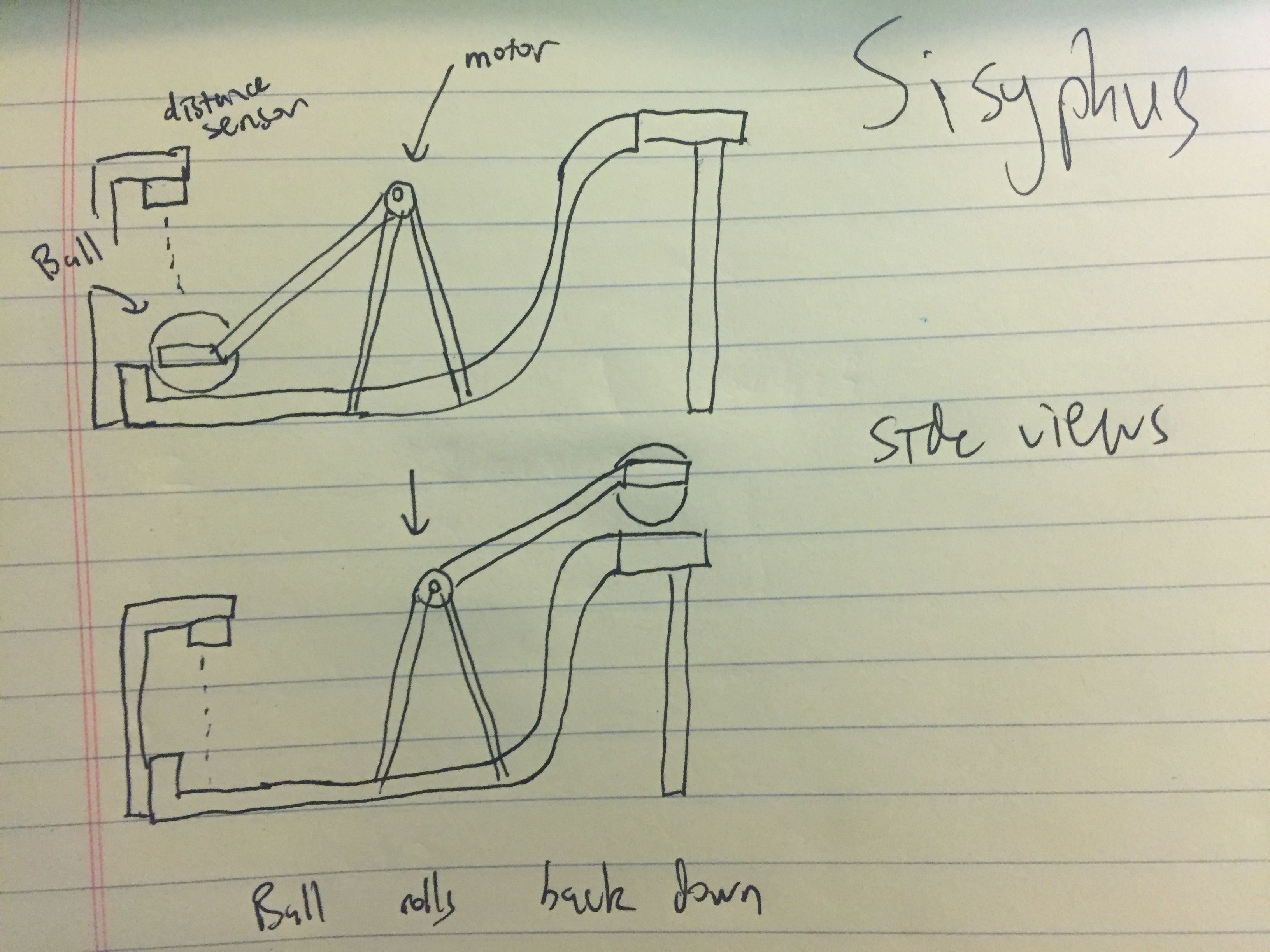
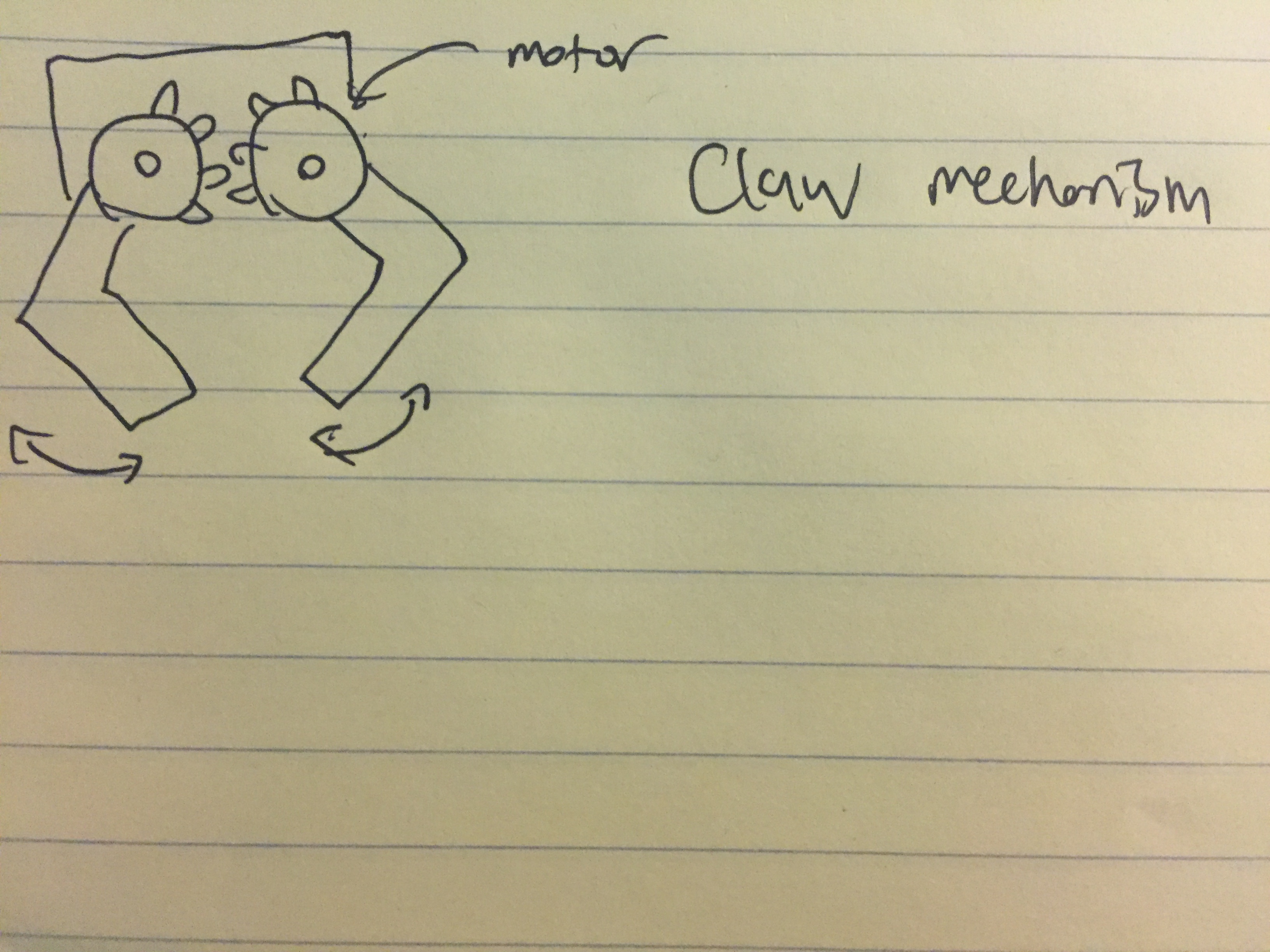
 This robot utilizes two motors and one distance sensor. One motor opens and closes the claw, and the other rotates the arm. When the distance sensor notices a ball, the arm activates and moves the ball to the top of the slide. The ball rolls down, and the action is repeated. The claw, arm, sensor, and slide all encompass the machine/robot aspect. The material it interacts with is the ball.
This robot utilizes two motors and one distance sensor. One motor opens and closes the claw, and the other rotates the arm. When the distance sensor notices a ball, the arm activates and moves the ball to the top of the slide. The ball rolls down, and the action is repeated. The claw, arm, sensor, and slide all encompass the machine/robot aspect. The material it interacts with is the ball.
The actions of the robot are supposed to evoke feelings of helplessness and a sort of endless cycle. It mirrors elements of Sisyphus, constantly moving this ball to the top of the slide before it inevitably rolls down and the action must be repeated, fruitlessly. It shows that everything has limits, even robots and automation. The form inclusion of the slide and the gripping claw allows it to properly manipulate it and achieve dynamic motion of rolling. In the Sisyphus narrative, the success would be keeping the ball at the top. However, since it always rolls down, it is a constant cycle of failure.
As mentioned previously, it would include two motors and one distance sensor. Other sensors may be used, as long as it has the ability to detect the ball, like a pressure sensor. The two motors would need to be bidirectional. We might be able to cut corners on the form’s appearance, but the general shapes and sensors/motors must be preserved.
Comments are closed.