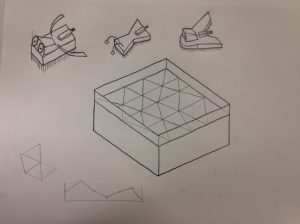
My idea for a project is to create a swarm of small buzzing robotic bugs that move around an enclosed space. The floor of the enclosure would be a series of hinged triangular panels allowing it to reshape through actuation. The moving floor would funnel the bugs to certain areas of the enclosure in response to an observer’s presence or the placement of “food” for the robotic bugs. The overall size would be a tabletop size, and the system would include a variety of actuation and sensing.
Comments are closed.