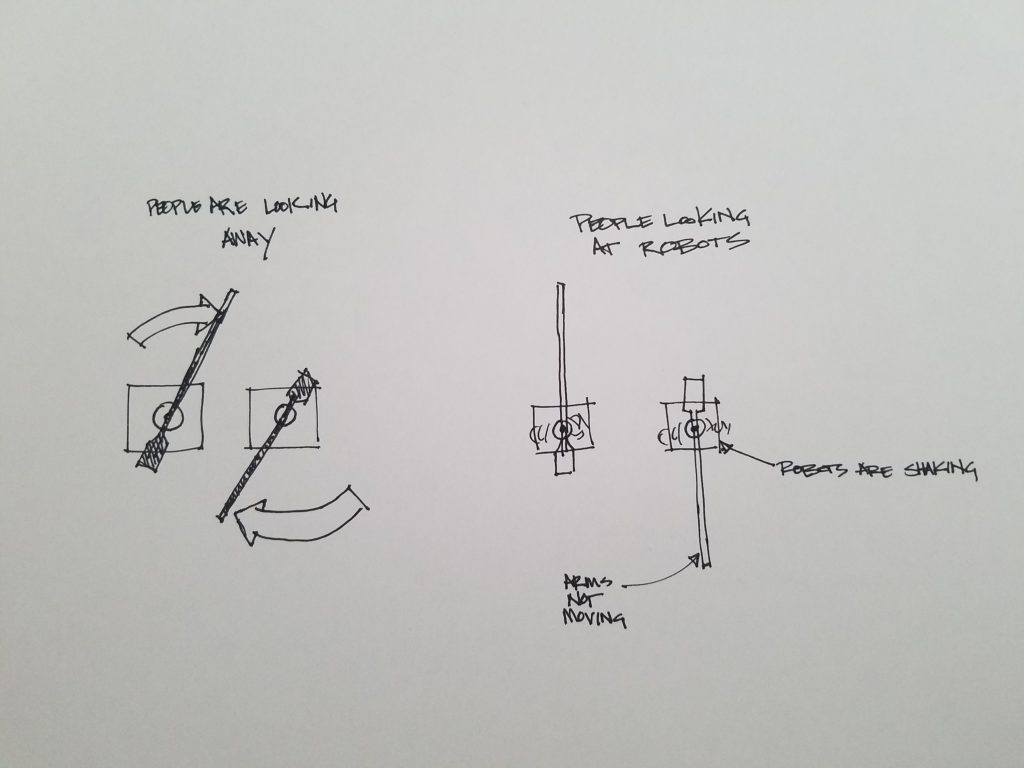
I’m interested in exploring the expressiveness of robots that won’t directly move when you look at them. Specifically, I’m interested in robots that perform an action when people are looking away from them, and stop performing that action when people look at them. In order for this to be interesting, there would need to be some sort of artifact from the action that can be perceived when the robot is once again looked at.
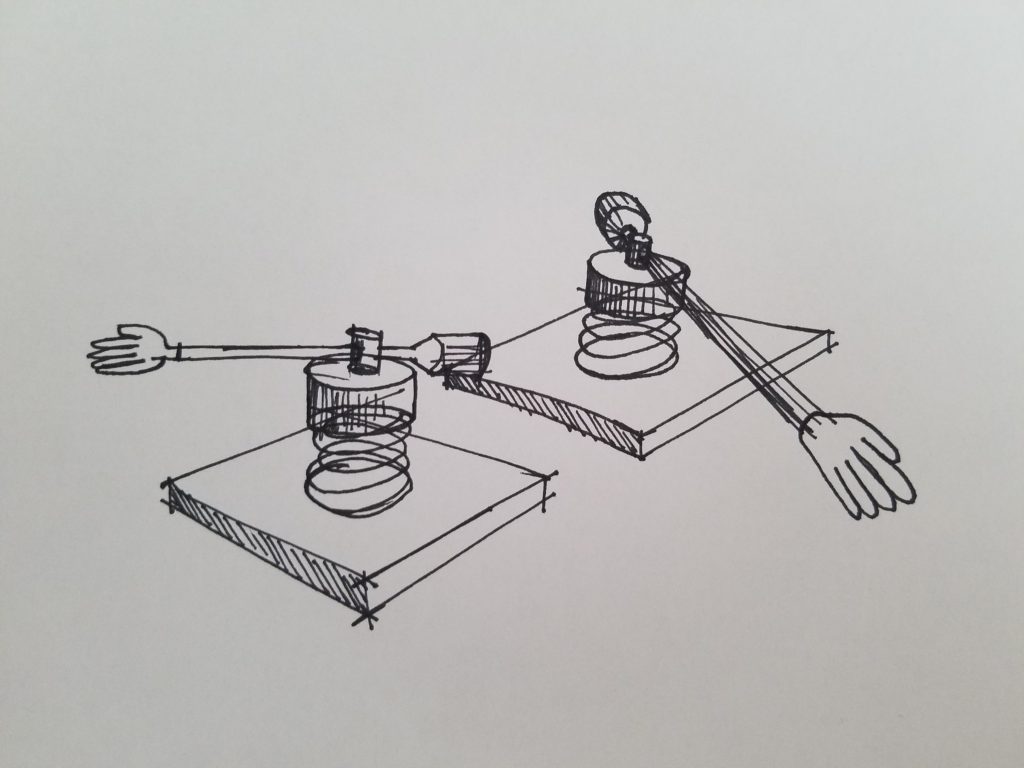
The action I’ve concluded could be effective for this is to have two robots with unstable bases that slap each other. While people aren’t looking, the robots would take turns slapping each other. The force of being slapped (and possibly the force of slapping itself) would cause the robot wobble on its base. Looking back at the robots would cause them to stop slapping each other, but the viewer would still see the wobbling that results from the slapping, and even when they aren’t looking, the viewer will be able to hear the robots slapping each other.
Comments are closed.