General Concept and Direction
We settled on pursuing the tactile worlds project, but significantly changing the form, while keeping the basic interactions the same.
The project still consist of two joysticks (now technically cranks rather than joysticks), but now each user is controlling one leg of a two legged robot that navigates a sandbox. The users are given free range to play in the sandbox with the robot, but they need to coordinate and communicate to achieve something with the robot.
Each crank provides physical feedback by way of a motor in the controller so the user is able to feel the forces being exerted on their respective leg. This gives each user the ability to feel the world the robot is interacting with, and to give them a tactile experience in addition to the experience of collaborating to make the robot move.
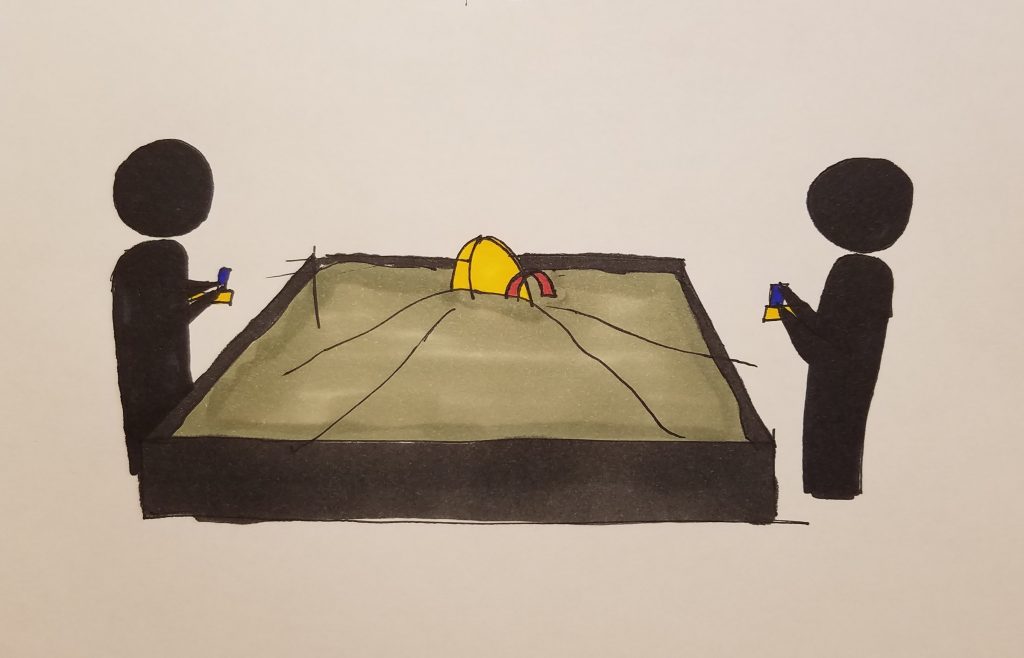
Note that the handle on one of the controllers should be red, not blue.
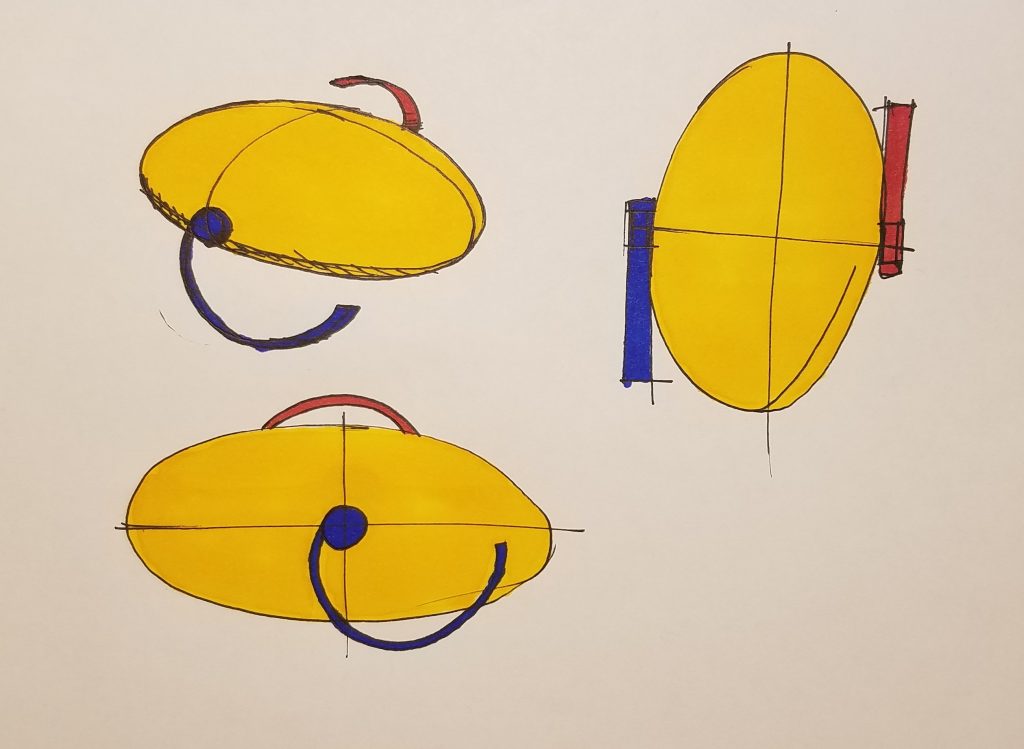
Robot and Joystick Forms
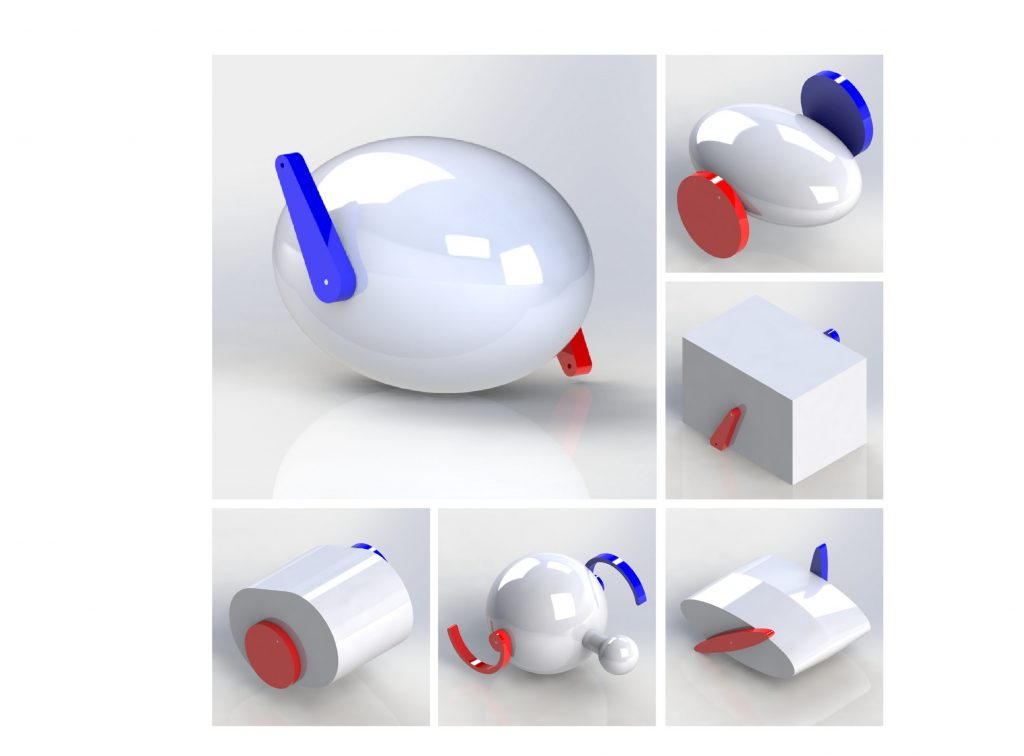
We experimented a bit with different potential forms for the robot bodies and legs, and for the controllers.
We came up with a couple different body forms that might interact differently with the sand as the legs drag the body through the sand. We also experimented with different leg shapes that might interact with the sand in different ways with regards to grip and motion.
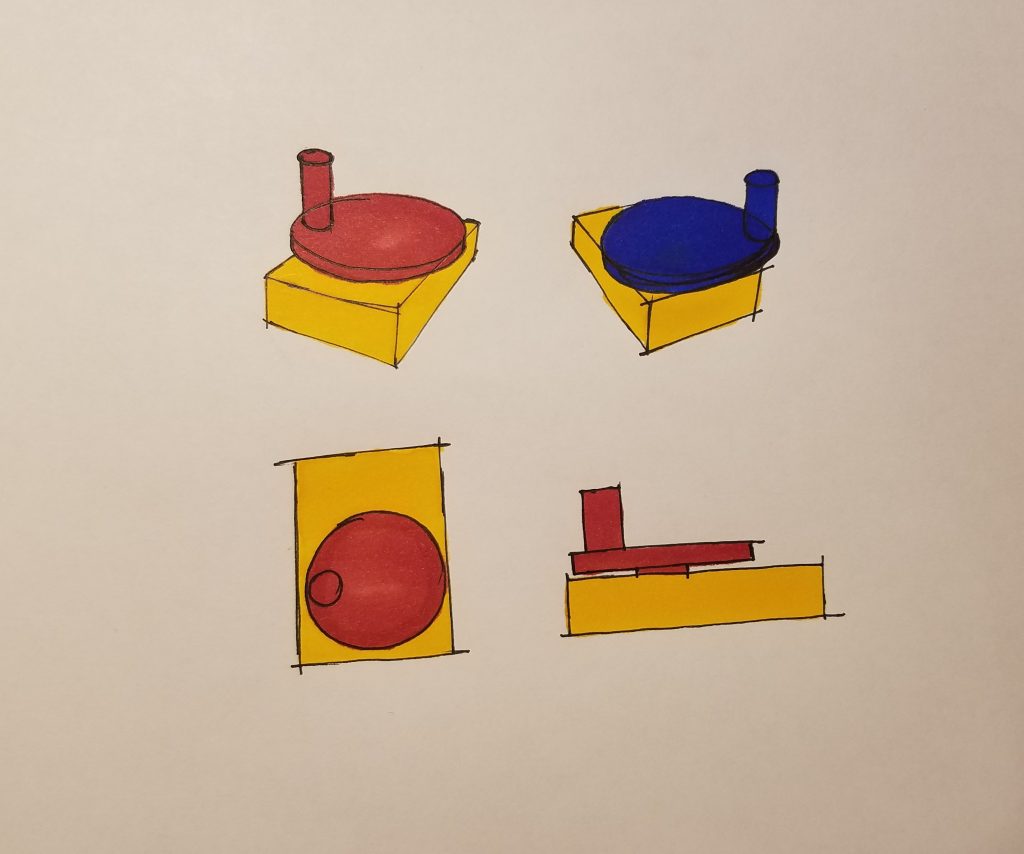
For controllers, we looked at a couple different commonplace interactions people have with rotational controllers. We ended up coming up with three different reference points: analog knobs found in things like sound systems, the winding mechanism in a fishing rod, and the large, floor-mounted crank found on machining equipment.

Comments are closed.