Proxy Robot Model¶
The proxy robot model is a simplification of the wobbly two-wheeled
robot intended for displaying the position of a remote robot using the
delegate robot model. The body has no actuators, sensors, or physics. It
does participate in collisions, acting like a fixed rigid body.
This model is demonstrated in the network-party.wbt world.
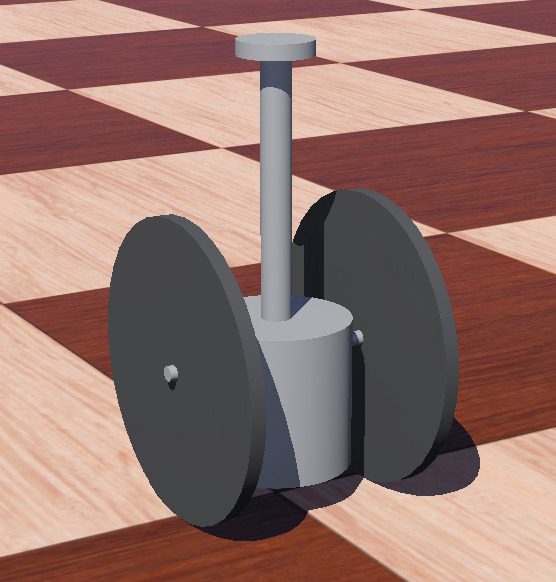
Screenshot of Webots model of a diff-drive ‘proxy’ robot.¶
Contents
proxy.proto¶
The robot model has been encapsulated in a .proto file for easy reuse. The model includes user-accessible scaling and color parameters.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 | #VRML_SIM R2021b utf8
# Proxy robot body to represent a remote robot, based on the wobbly robot body.
# This robot has no physics but is positioned by a delegate in response to
# position data reported over the network.
# documentation url: https://courses.ideate.cmu.edu/16-375
# license: No copyright, 2020 Garth Zeglin. This file is explicitly placed in the public domain.
PROTO proxy [
field SFVec3f translation 0 0 0
field SFRotation rotation 0 1 0 0
field SFString controller ""
field SFString name "proxy"
field SFFloat wheelRadius 0.1
field SFFloat axleLength 0.14
field SFColor bodyColor 0.8 0.8 0.8
field SFColor wheelColor 0.3 0.3 0.3
field SFString customData ""
]
{
Robot {
# connect properties to user-visible data fields
translation IS translation
rotation IS rotation
controller IS controller
name IS name
customData IS customData
# calculate derived parameters
%{
local counterweightHeight = fields.wheelRadius.value
local counterweightOffset = 0.75*fields.wheelRadius.value
local counterweightTop = 1.25*fields.wheelRadius.value
local sensorHeight = 3*fields.wheelRadius.value
local stalkHeight = sensorHeight - counterweightTop
local stalkOffset = counterweightTop + 0.5*stalkHeight
}%
children [
# The body group contains three cylinders: the massive counterweight at
# bottom, a thin stalk rising above it, topped by the sensor disc.
# All these shapes participate in collision; the axle is kept separate
# as it is just for rendering.
DEF bodyShape Group {
children [
# counterweight
Transform {
translation 0 0 %{= counterweightOffset }%
rotation 1 0 0 1.5708
children [
Shape {
appearance DEF bodyAppearance PBRAppearance {
baseColor IS bodyColor
roughness 0.5
metalness 0.5
}
geometry Cylinder {
height %{= counterweightHeight }%
radius 0.05
}
}
]
}
# sensor disc
Transform {
translation 0 0 %{= sensorHeight }%
rotation 1 0 0 1.5708
children [
Shape {
appearance USE bodyAppearance
geometry Cylinder {
height 0.01
radius 0.025
}
}
]
}
# stalk
Transform {
translation 0 0 %{= stalkOffset }%
rotation 1 0 0 1.5708
children [
Shape {
appearance USE bodyAppearance
geometry Cylinder {
height %{= stalkHeight }%
radius 0.01
}
}
]
}
]
}
# Visible axle shape, not part of the boundingObject.
DEF axleShape Transform {
translation 0 0 %{= fields.wheelRadius.value }%
children [
Shape {
appearance USE bodyAppearance
geometry Cylinder {
height %{= fields.axleLength.value + 0.02 }%
radius 0.005
}
}
]
}
# Define the left wheel axis, pointing in the +Y direction along the axle.
HingeJoint {
jointParameters HingeJointParameters {
axis 0 1 0
anchor 0 0 %{= fields.wheelRadius.value }%
}
# Define the left wheel solid, offset along +Y along the axle.
endPoint DEF leftWheel Solid {
translation 0 %{= 0.5*fields.axleLength.value }% %{= fields.wheelRadius.value }%
rotation 0 -1 0 0
children [
# Define the left wheel shape and appearance, which is used by the right wheel solid.
DEF wheelShape Transform {
rotation 0 0 1 0
children [
Shape {
appearance PBRAppearance {
baseColor IS wheelColor
roughness 0.5
metalness 0.5
}
geometry Cylinder {
height 0.01
radius %{= fields.wheelRadius.value }%
}
}
]
}
]
name "left wheel"
boundingObject USE wheelShape
}
}
# Define the right wheel axis, also pointing in the +Y direction along the axle
# so positive wheel rotations will move forward.
HingeJoint {
jointParameters HingeJointParameters {
axis 0 1 0
anchor 0 0 %{= fields.wheelRadius.value }%
}
# Define the right wheel solid, offset along -Y along the axle.
# The wheel shape is inherited from the left wheel.
endPoint DEF rightWheel Solid {
translation 0 %{= -0.5*fields.axleLength.value }% %{= fields.wheelRadius.value }%
rotation 0 0 1 3.14159
children [
USE wheelShape
]
name "right wheel"
boundingObject USE wheelShape
}
}
] # close children list of Robot
boundingObject USE bodyShape
} # close Robot
}
|