Clock Control Gain
P_gain = 0.10, D_gain = 0.005
We like the effect of how it looks when the clock hands are “looking for equilibrium.” With only the red hand really moving, and the green one having already found its place, the slight oscillation back and forth until it finally finds its resting place has a mesmerizing quality.
Our Objectives and Outcomes
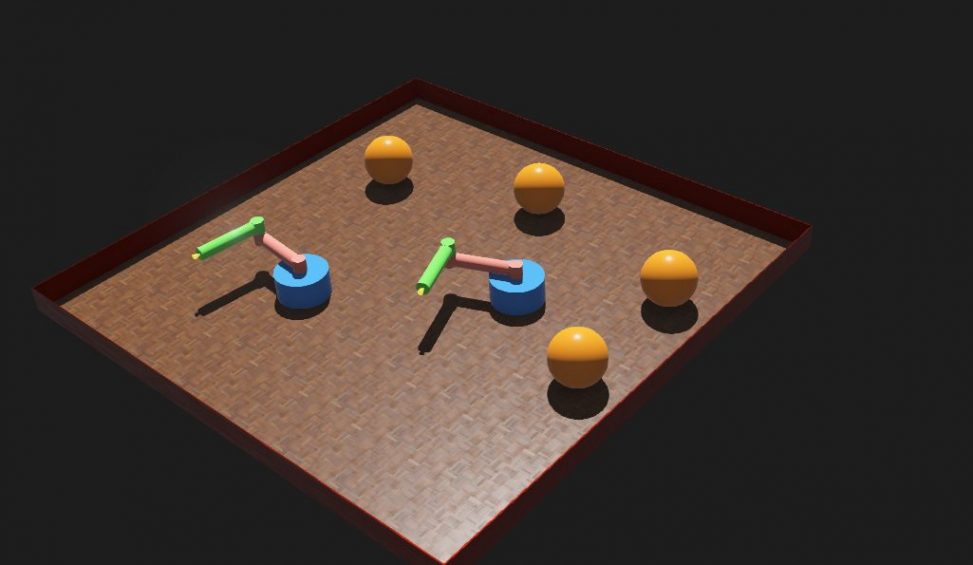
While brainstorming ideas, we thought of different ways things naturally interact without outside intervention – like magnets. The idea of attraction and repulsion really stuck with us as we explored the use of the DistanceSensor and led to our decision to make the robots “spin away” when anything comes close to its sensor. Since we didn’t make the actual two-link robots mobile in any way (by adding wheels, let’s say), we did this by making use of how the joints on the robots can spin in both directions.
What can be observed in our project video is an interaction between the two-link robots as well as with the prop balls in the arena. Every time a robot senses something in the range of its DistanceSensor, it begins to spin the other way – clockwise if it was going counter-clockwise and vice versa.
There are times when the robots sense one another and both turn away from the other. There are other times when a robot senses a ball but passes it so when it spins the other way, it passes it again – causing the robot to linger on the presence of the ball.