Conveyor¶
This sample project includes a robot which can manipulate a large object balanced on top using three driven wheels. This model demonstrates several key concepts: parallel-drive, holonomic kinematics, and simulator friction and collision modeling.
This model is demonstrated in the conveyor-demo.wbt world.
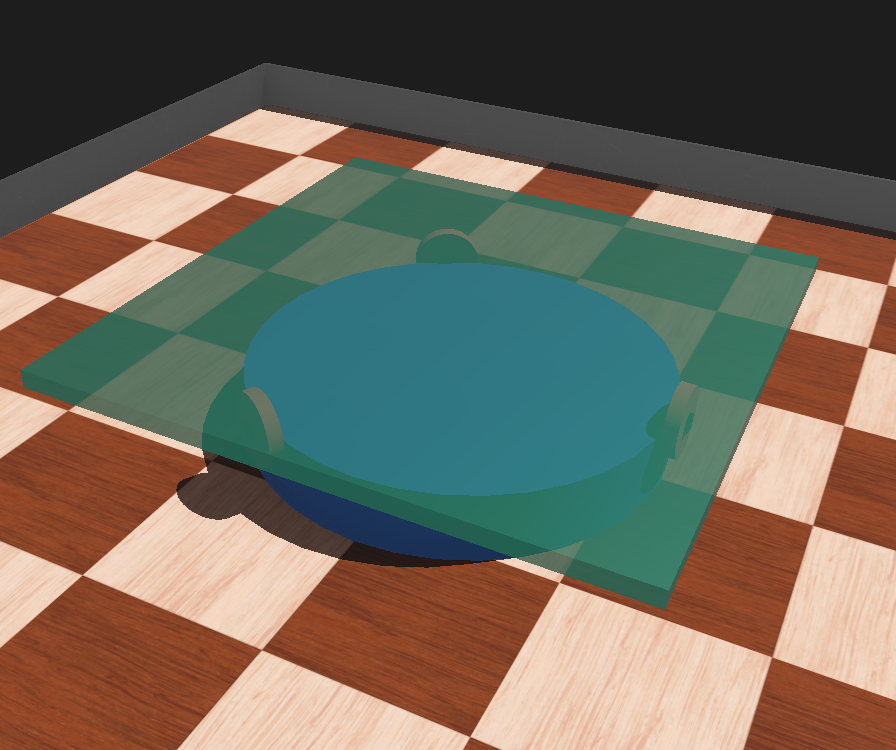
Screenshot of Webots model of the conveyor robot with three driven wheels making frictional contact with the semi-transparent manipulandum balanced on top.¶
Sample Robot Control Code¶
1# conveyor.py
2#
3# Sample Webots controller file for driving the three-wheel
4# conveyor demo. The robot comprises three driven wheels
5# arranged in a triangle. A large passive object (the
6# 'manipulandum') is balanced on top of the wheels for them to
7# move.
8#
9# No copyright, 2021, Garth Zeglin. This file is
10# explicitly placed in the public domain.
11
12print("loading conveyor.py...")
13
14# Import the Webots simulator API.
15from controller import Robot
16
17# Import standard Python modules
18import math, random
19
20print("conveyor.py waking up...")
21
22# Define the time step in milliseconds between
23# controller updates.
24EVENT_LOOP_DT = 20
25
26# Request a proxy object representing the robot to
27# control.
28robot = Robot()
29
30# Fetch handles for the joint sensors.
31sensors = (robot.getDevice('joint1'),
32 robot.getDevice('joint2'),
33 robot.getDevice('joint3'))
34
35# Specify the sampling rate for the joint sensors.
36for s in sensors:
37 s.enable(EVENT_LOOP_DT)
38
39# Fetch handle for each conveyor wheel motor. The motor1 axis
40# is positioned along X, so rotations will move the object along
41# Y. Motor2 is 120 degrees CCW from motor1.
42motors = (robot.getDevice('motor1'),
43 robot.getDevice('motor2'),
44 robot.getDevice('motor3'))
45
46# Define a few constant which match the model to be used for
47# kinematics calculations. All units are meters to match the
48# simulation.
49base_radius = 0.3
50wheel_radius = 0.05
51
52wheel_origins = ((0.3, 0.0, 0.1),
53 (-0.15,0.259808, 0.1),
54 (-0.15,-0.259808,0.1))
55
56wheel_axes = ((1.0,0.0,0.0),
57 (-0.5,0.866025,0),
58 (-0.5,-0.866025,0))
59
60# The wheel tangent axes define the direction of travel of the
61# top contact point for a positive wheel rotation.
62wheel_tangents = ((0.0,-1.0,0.0),
63 (0.866025, 0.5,0),
64 (-0.866025, 0.5,0))
65
66# In this example the motor will use velocity control,
67# configured by setting an infinite position target and then
68# using setVelocity() to issue motor commands.
69for motor in motors:
70 motor.setPosition(math.inf)
71 motor.setVelocity(0)
72
73################################################################
74# Dot product utility function. It would be better to use
75# numpy, but this avoids adding the dependency.
76def dot_product(v1, v2):
77 accum = 0.0
78 for e1, e2 in zip(v1, v2):
79 accum += e1*e2
80 return accum
81
82################################################################
83# Define action primitives to set the motor velocities for
84# particular manipulandum motions.
85
86def stop_motion(motors):
87 for m in motors:
88 m.setVelocity(0)
89
90def random_motion(motors):
91 for m in motors:
92 m.setVelocity(4*random.random() - 2.0)
93
94# Spin the object around the base center at the angular velocity
95# specified in radians/sec. N.B. 180 degrees == pi radians, 1
96# radian is about 57 degrees.
97def spin_around_center(motors, angvel=math.pi/12):
98 motor_vel = -(angvel*base_radius)/wheel_radius
99 print(f"All motors set to {motor_vel} rad/sec.")
100 for m in motors:
101 m.setVelocity(motor_vel)
102
103# Move the object along a XYZ velocity vector expressed in
104# meters/sec. This take the dot product of the velocity vector
105# with each wheel tangent vector to find the contribution of
106# each wheel to the linear velocity, then scales by the wheel
107# radius to each wheel rotational velocity.
108def move_along_vector(motors, velvec):
109 qd = [dot_product(velvec, tangent)/wheel_radius for tangent in wheel_tangents]
110 for m, v in zip(motors, qd):
111 m.setVelocity(v)
112 print(f"Applying motor velocities {qd} rad/sec.")
113
114# Move the object along the X axis at the linear velocity specified in
115# meters/second.
116def move_along_x(motors, vel=0.1):
117 # Take the dot product of the velocity vector with each
118 # wheel tangent vector to find the contribution of each
119 # wheel to the linear velocity, then scale by the wheel
120 # radius to find the rotational velocity.
121 move_along_vector(motors, (vel, 0.0, 0.0))
122
123# Move the object along the Y axis at the linear velocity specified in
124# meters/second.
125def move_along_y(motors, vel=0.1):
126 # Take the dot product of the velocity vector with each
127 # wheel tangent vector to find the contribution of each
128 # wheel to the linear velocity, then scale by the wheel
129 # radius to find the rotational velocity.
130 move_along_vector(motors, (0.0, vel, 0.0))
131
132
133################################################################
134# Define a few global variables for the behavior state machine.
135# This would be better represented as an object class.
136state_index = 'start'
137state_timer = 0
138state_new_flag = False
139
140# Utility function for state machine transitions.
141def transition(next_state):
142 global state_timer, state_index, state_new_flag
143 state_index = next_state
144 state_timer = 0.0
145 state_new_flag = True
146 print(f"Entering state {next_state}.")
147
148################################################################
149# Run an event loop until the simulation quits,
150# indicated by the step function returning -1.
151while robot.step(EVENT_LOOP_DT) != -1:
152
153 # Read simulator clock time.
154 t = robot.getTime()
155
156 # Read the new joint positions.
157 q = [joint.getValue() for joint in sensors]
158
159 # Evaluate a state machine to switch between action primitives.
160 state_timer -= 0.001 * EVENT_LOOP_DT
161 state_is_new = state_new_flag
162 state_new_flag = False
163
164 if state_index == 'start':
165 transition('spinning1')
166
167 elif state_index == 'spinning1':
168 if state_is_new:
169 state_timer = 2.0
170 spin_around_center(motors, 0.2)
171 elif state_timer < 0.0:
172 transition('pause1')
173
174 elif state_index == 'pause1':
175 if state_is_new:
176 state_timer = 1.0
177 stop_motion(motors)
178 elif state_timer < 0.0:
179 transition('X+')
180
181 elif state_index == 'X+':
182 if state_is_new:
183 move_along_x(motors, 0.1)
184 state_timer = 0.5
185 elif state_timer < 0.0:
186 transition('X-')
187
188 elif state_index == 'X-':
189 if state_is_new:
190 move_along_x(motors, -0.1)
191 state_timer = 1.5
192 elif state_timer < 0.0:
193 transition('pause2')
194
195 elif state_index == 'pause2':
196 if state_is_new:
197 state_timer = 1.0
198 stop_motion(motors)
199 elif state_timer < 0.0:
200 transition('spinning2')
201
202 elif state_index == 'spinning2':
203 if state_is_new:
204 spin_around_center(motors, -0.2)
205 state_timer = 1.0
206 elif state_timer < 0.0:
207 transition('Y+')
208
209 elif state_index == 'Y+':
210 if state_is_new:
211 move_along_y(motors, 0.1)
212 state_timer = 0.5
213 elif state_timer < 0.0:
214 transition('Y-')
215
216 elif state_index == 'Y-':
217 if state_is_new:
218 move_along_y(motors, -0.2)
219 state_timer = 1.5
220 elif state_timer < 0.0:
221 transition('pause3')
222
223 elif state_index == 'pause3':
224 if state_is_new:
225 state_timer = 1.0
226 stop_motion(motors)
227 elif state_timer < 0.0:
228 transition('spinning1')
World File¶
The robot is directly modeled in the scene tree so all parameters can be visible. In general it is more flexible to transfer models to .proto files so they can be instantiated more than once.
1#VRML_SIM R2023b utf8
2
3EXTERNPROTO "https://raw.githubusercontent.com/cyberbotics/webots/R2023b/projects/objects/floors/protos/RectangleArena.proto"
4EXTERNPROTO "https://raw.githubusercontent.com/cyberbotics/webots/R2023b/projects/appearances/protos/PaintedWood.proto"
5
6WorldInfo {
7}
8Viewpoint {
9 orientation 0.2762210002867493 0.07933708465413124 -0.9578139621028559 2.715308734468781
10 position 1.1687479458583148 0.5203935199223213 0.8904886319057939
11}
12Background {
13 skyColor [
14 0.1 0.1 0.1
15 ]
16}
17DirectionalLight {
18 direction 0.4 -0.5 -1
19 intensity 3
20 castShadows TRUE
21}
22RectangleArena {
23 rotation 1.8366025517039032e-06 -1.836602551703903e-06 0.9999999999966269 1.5707963267982696
24 floorSize 2 2
25}
26Robot {
27 rotation 0 0 1 1.5708
28 children [
29 DEF baseObject Transform {
30 translation 0 0 0.05
31 rotation 0.9999999999999999 0 0 3.6731891284930826e-06
32 children [
33 Shape {
34 appearance PaintedWood {
35 colorOverride 0.21529 0.543008 0.99855
36 }
37 geometry Cylinder {
38 height 0.1
39 radius 0.3
40 }
41 }
42 ]
43 }
44 HingeJoint {
45 jointParameters HingeJointParameters {
46 anchor 0 0 0.1
47 }
48 device [
49 PositionSensor {
50 name "joint1"
51 }
52 RotationalMotor {
53 name "motor1"
54 acceleration 2
55 maxVelocity 50
56 minPosition -10
57 maxPosition 10
58 maxTorque 20
59 }
60 ]
61 endPoint Solid {
62 translation 0.3 0 0.1
63 rotation 1 0 0 0
64 children [
65 DEF link1Shape Transform {
66 translation 0.01 0 0
67 rotation -0.5773506616397417 0.5773500729644677 -0.5773500729644677 2.0943945137181217
68 children [
69 Shape {
70 appearance PaintedWood {
71 colorOverride 0.990494 0.516915 0.468254
72 }
73 geometry Cylinder {
74 height 0.02
75 radius 0.05
76 }
77 }
78 ]
79 }
80 Transform {
81 translation 0.01 0 0
82 rotation 0 0 1 -1.5707953071795862
83 children [
84 Shape {
85 appearance PBRAppearance {
86 baseColor 0.511208 0.757198 0.00920119
87 }
88 geometry Box {
89 size 0.02 0.03 0.02
90 }
91 }
92 ]
93 }
94 ]
95 name "link1"
96 boundingObject USE link1Shape
97 physics Physics {
98 density -1
99 mass 0.5
100 }
101 }
102 }
103 HingeJoint {
104 jointParameters HingeJointParameters {
105 axis -0.5 0.866025 0
106 anchor 0 0 0.1
107 }
108 device [
109 PositionSensor {
110 name "joint2"
111 }
112 RotationalMotor {
113 name "motor2"
114 acceleration 2
115 maxVelocity 50
116 minPosition -10
117 maxPosition 10
118 maxTorque 20
119 }
120 ]
121 endPoint Solid {
122 translation -0.15 0.259808 0.1
123 rotation 0 0 1 2.0944
124 children [
125 DEF link2Shape Transform {
126 translation 0.01 0 0
127 rotation -0.5773506616397417 0.5773500729644677 -0.5773500729644677 2.0943945137181217
128 children [
129 Shape {
130 appearance PaintedWood {
131 colorOverride 0.990494 0.516915 0.468254
132 }
133 geometry Cylinder {
134 height 0.02
135 radius 0.05
136 }
137 }
138 ]
139 }
140 Transform {
141 translation 0.01 0 0
142 rotation 0 0 1 -1.5707953071795862
143 children [
144 Shape {
145 appearance PBRAppearance {
146 baseColor 0.511208 0.757198 0.00920119
147 }
148 geometry Box {
149 size 0.02 0.03 0.02
150 }
151 }
152 ]
153 }
154 ]
155 name "link2"
156 boundingObject USE link2Shape
157 physics Physics {
158 density -1
159 mass 0.5
160 }
161 }
162 }
163 HingeJoint {
164 jointParameters HingeJointParameters {
165 axis -0.5 -0.866025 0
166 anchor 0 0 0.1
167 }
168 device [
169 PositionSensor {
170 name "joint3"
171 }
172 RotationalMotor {
173 name "motor3"
174 acceleration 2
175 maxVelocity 50
176 minPosition -10
177 maxPosition 10
178 maxTorque 20
179 }
180 ]
181 endPoint Solid {
182 translation -0.15 -0.259808 0.1
183 rotation 0 0 1 4.1887902047863905
184 children [
185 DEF link3Shape Transform {
186 translation 0.01 0 0
187 rotation -0.5773506616397417 0.5773500729644677 -0.5773500729644677 2.0943945137181217
188 children [
189 Shape {
190 appearance PaintedWood {
191 colorOverride 0.990494 0.516915 0.468254
192 }
193 geometry Cylinder {
194 height 0.02
195 radius 0.05
196 }
197 }
198 ]
199 }
200 Transform {
201 translation 0.01 0 0
202 rotation 0 0 1 -1.5707953071795862
203 children [
204 Shape {
205 appearance PBRAppearance {
206 baseColor 0.511208 0.757198 0.00920119
207 }
208 geometry Box {
209 size 0.02 0.03 0.02
210 }
211 }
212 ]
213 }
214 ]
215 name "link3"
216 boundingObject USE link3Shape
217 physics Physics {
218 density -1
219 mass 0.5
220 }
221 }
222 }
223 ]
224 name "conveyor"
225 boundingObject USE baseObject
226 controller "conveyor"
227}
228Solid {
229 translation 0 0 0.17
230 children [
231 DEF manipShape Shape {
232 appearance PBRAppearance {
233 baseColor 0.341176 1 0.819608
234 transparency 0.05
235 roughness 0.3
236 }
237 geometry Box {
238 size 0.8 0.8 0.025
239 }
240 }
241 ]
242 name "manipulandum"
243 boundingObject USE manipShape
244 physics Physics {
245 density -1
246 mass 2
247 }
248}