Tilt Table¶
This sample project includes a round rimmed table driven with roll and pitch actuators. The world includes a ball rolling around the table. This was developed as an exploration of hybrid control: a human operator can steer the tray using mouse gestures while collecting data, then switch to an automatic mode to drive the table using a model regressed from the gesture data.
It is also a technology demonstration for the following Webots features:
Camera: camera-based object tracking using a Recognition node in a Camera node
SpotLight: program-controlled illumination using a SpotLight node in a LED node
Mesh: external STL geometry referenced by path using a Mesh node
Mouse: gesture input using the Mouse object
Keyboard: keyboard input using the Keyboard object
The regression is performed using the Support Vector Machine module within the scikit-learn library.
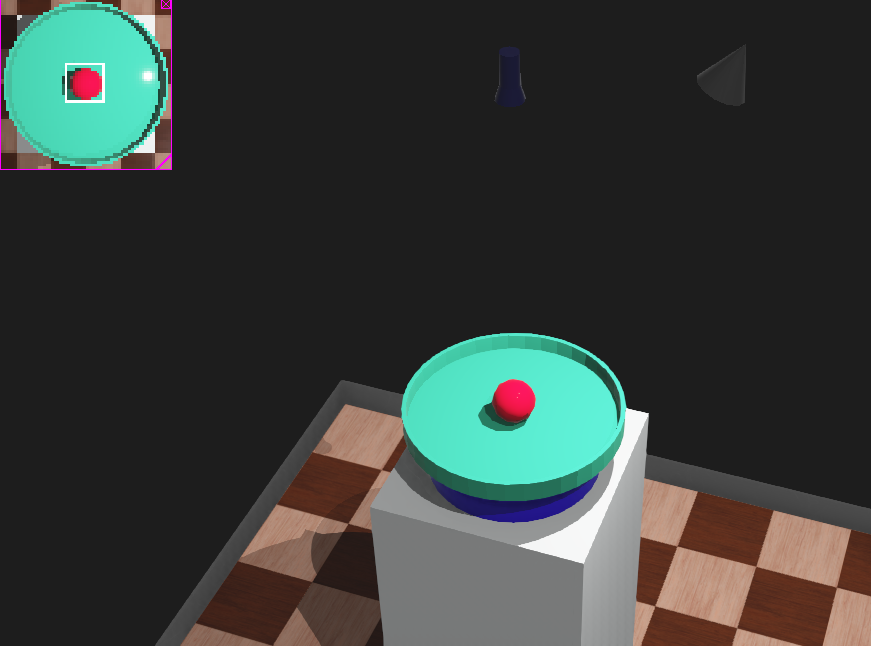
Screenshot of Webots model of the tilt-table robot. The camera view appears in the upper left corner, with the object location marked by a white box. The blue object above the table marks the camera location. The white cone marks the SpotLight location.¶
Tilt Table World File¶
This model is demonstrated in the tilt-table.wbt world available within the
Webots.zip archive.
A few notes:
The Camera node is a subclass of Solid and so has a children list which can hold the Shapes used to represent the camera itself.
The Camera has several slots for special feature nodes. This model uses the Recognition nodes to identify objects. Note that red ball has the recognitionColors field set for this to work.
The SpotLight node is a pure light source; in this model it appears within a Transform which also includes a Shape with Cone so that the location is visible.
The SpotLight is not directly controllable, but is wrapped in a controllable LED node which can set its color.
The Mesh node uses a relative path in the url field to specify an STL file; this keeps the world file portable across machines.
1#VRML_SIM R2023b utf8
2
3EXTERNPROTO "https://raw.githubusercontent.com/cyberbotics/webots/R2023b/projects/objects/floors/protos/RectangleArena.proto"
4EXTERNPROTO "https://raw.githubusercontent.com/cyberbotics/webots/R2023b/projects/appearances/protos/GlossyPaint.proto"
5EXTERNPROTO "../protos/pedestal.proto"
6
7WorldInfo {
8 basicTimeStep 5
9}
10Viewpoint {
11 orientation -0.3052720823884429 -0.02625041344364109 0.9519032889470767 3.225206713187698
12 position 0.7998569010554496 0.06830636341970958 1.7040116542364134
13}
14Background {
15 skyColor [
16 0.1 0.1 0.1
17 ]
18}
19DirectionalLight {
20 direction -0.4 -0.5 -1
21 castShadows TRUE
22}
23RectangleArena {
24 floorSize 2 2
25}
26pedestal {
27 width 0.5
28 depth 0.5
29 height 1
30}
31Robot {
32 translation 0 0 1
33 children [
34 HingeJoint {
35 jointParameters HingeJointParameters {
36 anchor 0 0 0.1
37 }
38 device [
39 RotationalMotor {
40 name "j1"
41 }
42 ]
43 endPoint Solid {
44 translation 0 0 0.1
45 rotation 1 0 0 0
46 children [
47 DEF disc1 Pose {
48 rotation 0 1 0 1.5708
49 children [
50 Shape {
51 appearance GlossyPaint {
52 baseColor 0.772549 0.2 0.192157
53 }
54 geometry Cylinder {
55 height 0.01
56 radius 0.02
57 }
58 }
59 ]
60 }
61 HingeJoint {
62 jointParameters HingeJointParameters {
63 axis 0 1 0
64 anchor 0 0 -0.1
65 }
66 device [
67 RotationalMotor {
68 name "j2"
69 }
70 ]
71 endPoint Solid {
72 translation 0 0 0.020000000000000004
73 rotation 0 1 0 0
74 children [
75 DEF table Pose {
76 rotation 1 0 0 1.5708
77 children [
78 Shape {
79 appearance DEF tableColor GlossyPaint {
80 baseColor 0.192157 0.772549 0.589319
81 }
82 geometry Mesh {
83 url [
84 "../stl/tilt-tray.stl"
85 ]
86 }
87 }
88 ]
89 }
90 ]
91 boundingObject USE table
92 physics Physics {
93 density -1
94 mass 2
95 centerOfMass [
96 0 0.05 0
97 ]
98 inertiaMatrix [
99 0.03 0.03 0.06
100 0 0 0
101 ]
102 }
103 }
104 }
105 ]
106 physics Physics {
107 density -1
108 mass 2
109 centerOfMass [
110 0 0.05 0
111 ]
112 inertiaMatrix [
113 0.03 0.03 0.06
114 0 0 0
115 ]
116 }
117 }
118 }
119 DEF base Pose {
120 translation 0 0 0.025
121 children [
122 Shape {
123 appearance GlossyPaint {
124 baseColor 0.180392 0 1
125 }
126 geometry Cylinder {
127 height 0.05
128 radius 0.2
129 }
130 }
131 ]
132 }
133 DEF cameraPose Pose {
134 translation 0 0 1
135 rotation 0 1 0 1.5708
136 children [
137 Camera {
138 rotation 1 0 0 3.14159
139 children [
140 Pose {
141 rotation 0 1 0 -1.5708
142 children [
143 Shape {
144 appearance DEF cameraColor GlossyPaint {
145 baseColor 0.0631418 0.0591135 0.308217
146 }
147 geometry Cone {
148 bottomRadius 0.03
149 height 0.1
150 }
151 }
152 Shape {
153 appearance USE cameraColor
154 geometry Cylinder {
155 height 0.1
156 radius 0.02
157 }
158 }
159 ]
160 }
161 ]
162 fieldOfView 0.6
163 recognition Recognition {
164 occlusion 0
165 frameColor 1 1 1
166 }
167 }
168 ]
169 }
170 DEF spotLight Pose {
171 translation -0.0515544 0.409762 1.07217
172 rotation -0.11680496430032018 -0.8872287288318889 0.4462978635957732 -1.4962553071795863
173 children [
174 Pose {
175 rotation 0 1 0 -1.5707953071795862
176 children [
177 Shape {
178 appearance GlossyPaint {
179 baseColor 0.266102 0.266102 0.266102
180 }
181 geometry Cone {
182 bottomRadius 0.05
183 height 0.1
184 }
185 }
186 ]
187 }
188 LED {
189 children [
190 SpotLight {
191 attenuation 0 0 1
192 beamWidth 0.7
193 color 0 0 0
194 direction 1 0 0
195 intensity 3
196 on FALSE
197 castShadows TRUE
198 }
199 ]
200 name "spotlight"
201 color []
202 gradual TRUE
203 }
204 ]
205 }
206 ]
207 name "tilt-table"
208 controller "tilt_table"
209}
210Solid {
211 translation 0 0 1.2
212 children [
213 DEF ball Shape {
214 appearance GlossyPaint {
215 baseColor 1 0 0.180591
216 }
217 geometry Sphere {
218 radius 0.05
219 }
220 }
221 ]
222 name "ball"
223 boundingObject USE ball
224 physics Physics {
225 }
226 recognitionColors [
227 1 0 0
228 ]
229}
Tilt Table Control Code¶
1# tilt_table.py
2#
3# Sample Webots controller file for driving the
4# two-DOF tilt table device.
5#
6# No copyright, 2022, Garth Zeglin. This file is
7# explicitly placed in the public domain.
8
9# References:
10# https://scikit-learn.org/stable/modules/svm.html
11# https://www.cyberbotics.com/doc/reference/led?tab-language=python
12# https://www.cyberbotics.com/doc/reference/camera?tab-language=python
13
14print("loading tilt_table.py...")
15
16# Import the Webots simulator API.
17from controller import Robot
18from controller import Mouse
19from controller import Keyboard
20
21# Import standard Python libraries.
22import math, random
23
24# Import scikit libraries.
25from sklearn import svm
26import numpy as np
27
28print("tilt_table.py waking up...")
29print("Use the mouse to control the table tilt, then press A to toggle automatic mode.")
30
31# Define the time step in milliseconds between
32# controller updates.
33EVENT_LOOP_DT = 20
34
35# Request a proxy object representing the robot to
36# control.
37robot = Robot()
38
39# Fetch handle for the 'base' joint motor.
40motor1 = robot.getDevice('j1')
41motor2 = robot.getDevice('j2')
42
43# Enable computer keyboard input for user control.
44keyboard = Keyboard()
45keyboard.enable(EVENT_LOOP_DT)
46last_key = None
47
48# Request mouse updates for user input.
49mouse = Mouse()
50mouse.enable(EVENT_LOOP_DT)
51
52# Enable the overhead camera.
53camera = robot.getDevice('camera')
54camera.enable(EVENT_LOOP_DT)
55camera.recognitionEnable(EVENT_LOOP_DT)
56
57# Connect to the spotlight.
58spotlight = robot.getDevice('spotlight')
59
60################################################################
61# Global buffer to record machine states for policy regression.
62# The system observes tuples [ball_u, ball_v, j1, j2]
63# The policy regression maps [ball_u, ball_v] -> [d_j1, d_j2]
64samples = []
65J1_policy = None
66J2_policy = None
67automatic = False
68
69def make_policy(history):
70 # return a pair of models J1 and J2 which map the current state to the next actuator command
71 J1 = svm.SVR()
72 J2 = svm.SVR()
73 ndata = np.array(history)
74 states = ndata[:,0:2] # slice representing current state
75 Y1 = ndata[:,2] # slice representing J1 policy output
76 Y2 = ndata[:,3] # slice representing J2 policy output
77 J1.fit(states, Y1) # fit the J1 model
78 J2.fit(states, Y2) # fit the J2 model
79 return J1, J2
80
81################################################################
82# Run an event loop until the simulation quits,
83# indicated by the step function returning -1.
84while robot.step(EVENT_LOOP_DT) != -1:
85
86 # Read simulator clock time in seconds (discretized by EVENT_LOOP_DT milliseconds).
87 t = robot.getTime()
88
89 # Read the camera ball tracker state.
90 objects = camera.getRecognitionObjects()
91 if objects is None or len(objects) == 0:
92 print("Warning: no ball detected.")
93 ball = None
94 else:
95 # read the [u, v] integer pixel location of ball
96 # [0,0] is upper left, [64,64] is lower right
97 ball = objects[0].getPositionOnImage()
98
99 # Drive the light based on ball position.
100 if ball is not None:
101 if abs(ball[0]-32) < 10 and abs(ball[1]-32) < 10:
102 spotlight.set(0xffffff) # 0xRRGGBB color integer
103 else:
104 spotlight.set(0x000000)
105
106 # Read any computer keyboard keypresses. Returns -1 or an integer keycode while a key is held down.
107 # This is debounced to detect only changes.
108 key = keyboard.getKey()
109 if key != last_key:
110 last_key = key
111 if key != -1:
112 # convert the integer key number to a lowercase single-character string
113 letter = chr(key).lower()
114 # Set mode based on keypresses.
115 if letter == 'a':
116 if automatic is False:
117 print("Entering automatic mode with %d input samples." % (len(samples)))
118 automatic = True
119 J1_policy, J2_policy = make_policy(samples)
120 else:
121 print("Exiting automatic mode.")
122 automatic = False
123 samples = []
124
125 if automatic:
126 # in automatic mode, use the policy to select the next action
127 if ball is not None:
128 # scale the samples to unity range; SVM is sensitive to scaling
129 state = [0.01*ball[0], 0.01*ball[1]]
130 angle1 = 0.1 * J1_policy.predict([state])[0]
131 angle2 = 0.1 * J2_policy.predict([state])[0]
132 angle1 = min(max(angle1, -0.1), 0.1)
133 angle2 = min(max(angle2, -0.1), 0.1)
134 motor1.setPosition(angle1)
135 motor2.setPosition(angle2)
136 # print("Policy:", state, angle1, angle2)
137
138 else:
139 # Read the mouse state to control the robot.
140 # The (u,v) coordinates are (0,0) in the upper left and (1,1) in the lower right.
141 ms = mouse.getState()
142 if (not math.isnan(ms.u)) and (not math.isnan(ms.v)):
143 angle1 = -0.2 * (ms.u - 0.5)
144 angle2 = 0.2 * (ms.v - 0.5)
145 motor1.setPosition(angle1)
146 motor2.setPosition(angle2)
147
148 # record the policy trajectory
149 if ball is not None:
150 # scale the samples to unity range; SVM is sensitive to scaling
151 samp = [0.01*ball[0], 0.01*ball[1], 10*angle1, 10*angle2]
152 samples.append(samp)
153 # print("Sample: ", samp)