
by Celia Kasberg, Helen Yu, and Elle Smith
Premise
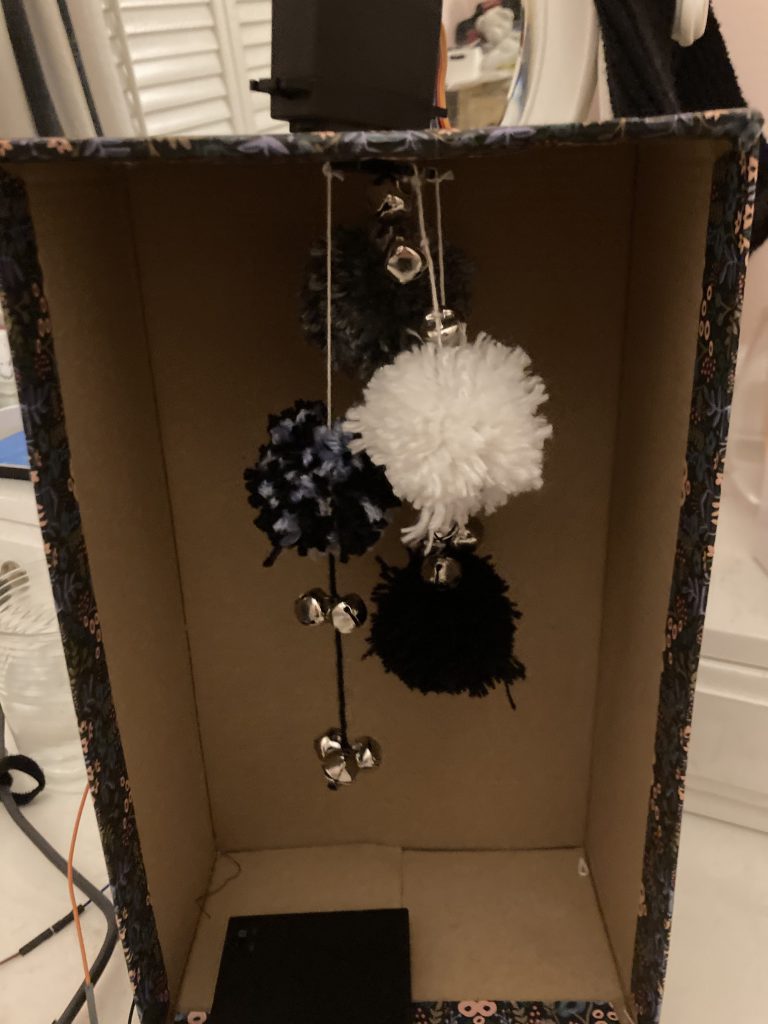
One of the things lost in remote classes and virtual meetings is the subconcious life of the people around you. From foot taps to occasional sighs, big stretches to verbal “loading sounds”, and pencil taps to chair jitters. Team Pom Pom telematically reanimates the subconscious character with articulate twirling pom pom creatures that jingle with every remote movement.
Ambient Telematic Wind Chimes


Reflection
By embedding the concept of kitsch through the use of crafty pom poms, beads, and bells, we were able to create individualized wind chimes that reflected our personalities and help us connect with one another. Making the pom poms different sizes and having the pendulums at varied lengths allowed for each set of wind chimes to create a different spin pattern and add a happy and cheerful element to this project. Altogether, these wind chimes offered both a visual and auditory presence which connected us through ambient proxy motion!
Code
"""
Project 1: Ambient Proxy Body
Team Pom Pom
Helen Yu (heleny1), Celia Kasberg (ckasberg), Elle Smith
Written by Helen Yu
Last Updated: 4/6/21
Summary: As your partner fidgets in their chair, your wind chimes spin
in reaction to your partner's presence. Small and slow movements trigger
a sweeping motion in the servo. Fast and sharp movements trigger a stepping
sweep in the servo.
Inputs: Accelerometer
Outputs: Hobby Servo on SD A5
"""
# ----------------------------------------------------------------
# Import any needed standard Python modules.
import time, math, sys
# Import the board-specific input/output library.
from adafruit_circuitplayground import cp
# Import the low-level hardware libraries.
import board
import digitalio
import analogio
import pwmio
# Import the Adafruit helper library.
from adafruit_motor import servo
# Import the runtime for checking serial port status.
import supervisor
# ----------------------------------------------------------------
# Initialize hardware.
# Create a PWMOut object on pad SDA A5 to generate control signals.
pwm = pwmio.PWMOut(board.A5, duty_cycle=0, frequency=50)
# Create a Servo object which controls a hobby servo using the PWMOut.
actuator = servo.Servo(pwm, min_pulse=50, max_pulse=3000)
# ----------------------------------------------------------------
# Initialize global variables for the main loop.
# The remote move state can be updated via serial port messages.
remote_moves = [0, 0, 0, 0, 0]
# Measure the time since the last remote move message, and reset after a period without data.
remote_moves_timer = False
# Convenient time constant expressed in nanoseconds.
second = 1000000000
# Integer time stamp for the next console output.
sensing_timer = time.monotonic()
# Integer time stamp for next behavior activity to begin.
next_activity_time = time.monotonic_ns() + 2 * second
# Flag to trigger motion.
sweep_slow = False
sweep_fast = False
phase_angle = 0.0
phase_rate = 2*math.pi / 6.0 # one cycle per six seconds, in radians/second
# Integer time stamp for next servo update.
next_servo_update = time.monotonic_ns()
# The serial port output rate is regulated using the following timer variables.
serial_timer = 0.0
serial_interval = 0.5
# ----------------------------------------------------------------
# Begin the main processing loop.
while True:
# Read the current integer clock.
now = time.monotonic()
# Measure and define local acceleration
x, y, z = cp.acceleration
l_x = abs(int(x))
l_y = abs(int(y))
l_z = abs(int(z))
local_moves = l_x, l_y, l_z
# Check the serial input for new line of remote data
if supervisor.runtime.serial_bytes_available:
line = sys.stdin.readline()
tokens = line.split()
if len(tokens) == 5:
try:
remote_moves = [int(token) > 0 for token in tokens]
remote_move_timer = 4.0
except ValueError:
pass
#---- periodic console output -----------------------------------
# Poll the time stamp to decide whether to emit console output.
if now >= sensing_timer:
sensing_timer += 100000000 #0.1sec
if any(local_moves):
remote_moves_timer = now + 4000000000 # 4 sec timeout
if now >= serial_timer:
serial_timer += serial_interval
moves = ["1" if 1 < l_x < 3 else "0", "1" if l_y > 1 else "0", "1" if 1 < l_z < 3 else "0", "1" if l_x > 3 else "0", "1" if l_z > 3 else "0"]
print(" ".join(moves))
# If a slow movement has been received, sweep twice at a constant speed
if sweep_slow is True:
for angle in range(0, 180, 10):
actuator.angle = angle
time.sleep(0.02)
print("Reversing slow sweep.")
for angle in range(180, 0, -10):
actuator.angle = angle
time.sleep(0.02)
print("End of slow cycle")
sweep_slow = False
# If a fast movement has been received, sweep twice in a stepping motion
if sweep_fast is True:
for angle in range(0, 180, 10):
actuator.angle = angle
time.sleep(0.2)
print("Reversing fast sweep.")
for angle in range(180, 0, -10):
actuator.angle = angle
time.sleep(0.2)
print("End of fast cycle")
sweep_fast = False
if any(remote_moves):
# Check whether there was any remote movement
if remote_moves[0] or remote_moves[2]:
if remote_moves[1]:
sweep_slow = True
print("Entering slow cycle.")
if remote_moves[3] or remote_moves[4]:
if remote_moves[1]:
sweep_fast = True
print("Entering fast cycle")
remote_moves = [False]*5
#---- periodic servo motion commands ----------------------------
# If the time has arrived to update the servo command signal:
if now >= next_servo_update:
next_servo_update += 20000000 # 20 msec in nanoseconds (50 Hz update)
Leave a Reply
You must be logged in to post a comment.