Update
We decided to use two soft sensor pads for each puppet, a green one to control the left and right motion of the puppet and a yellow one to control the speed at which hobby servo moves.
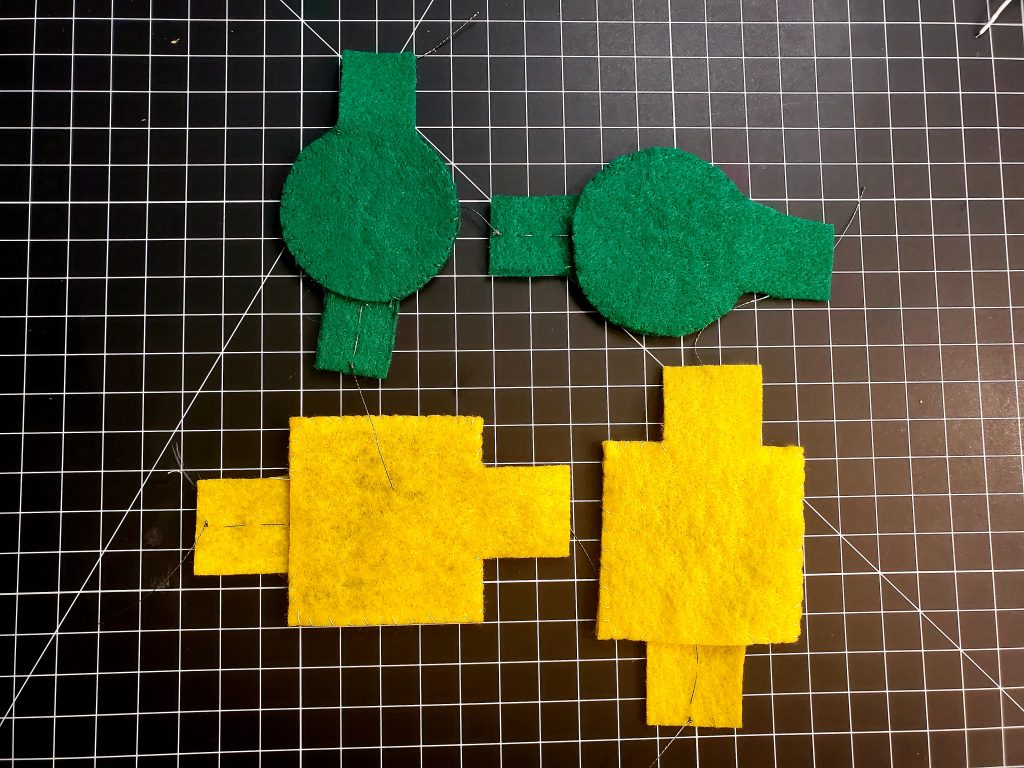
Using Rebecca’s new code, I was able to successfully control the Garth puppet’s movements using one of the green of the soft sensor pads I made. Pressing on the sensor once causes the puppet to move to the left and right one time, but when you press on the sensor continuously it causes the Garth puppet to move back and forth multiple times.
Enviroment Update
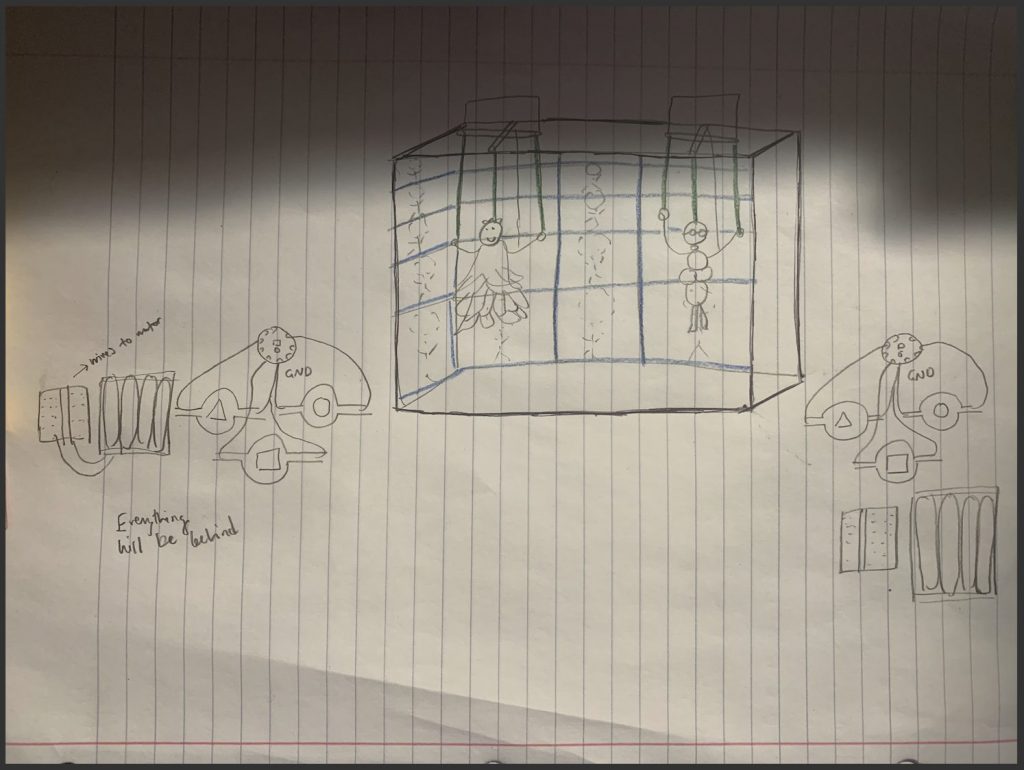
I created a small sketch of how we would want our environment to actually look like. We decided on placing both marionettes into a box, to place them in to move and interact with each other. We also have a set up for the button to control the speed and direction of the puppets.
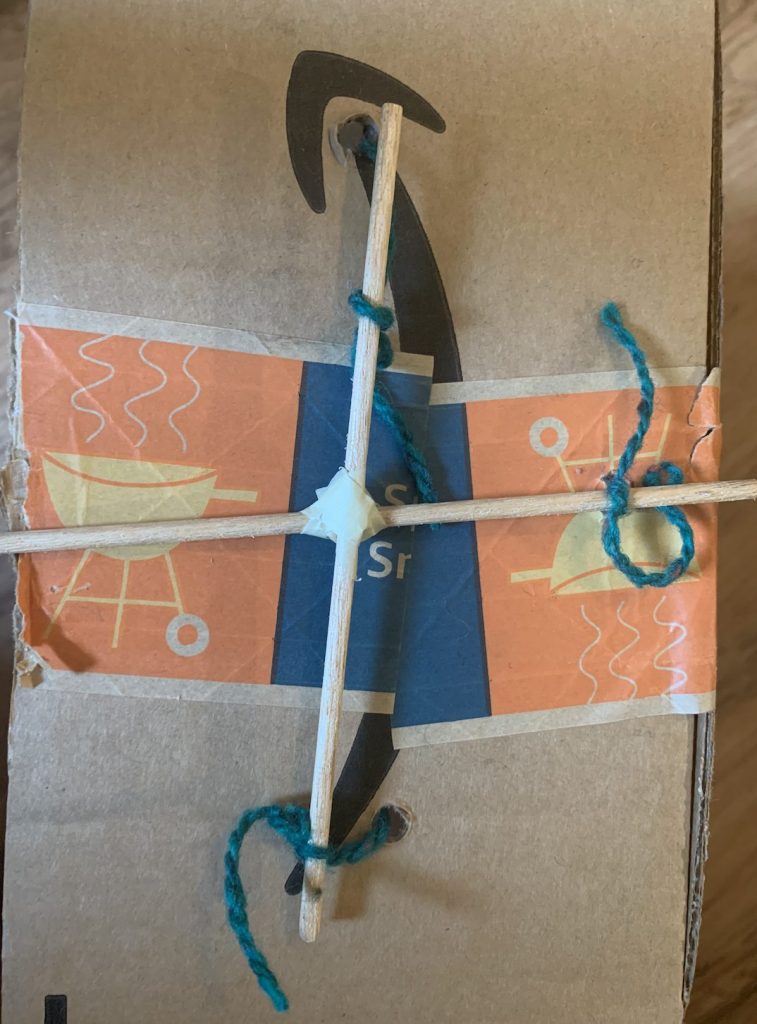
I decided it was best to pull the strings through the box, then attach the sticks that connect to the puppet, this allowed the full range of the motor to be intact and it gave the motor a flat surface to lay on.
Leave a Reply
You must be logged in to post a comment.