For this first project you will work in groups to develop a proof-of-concept design system, then apply it to produce two annular tiles fabricated in plaster. The resulting tiles will be sized to fill a section of the arch in the Museumlab studio lab space.
The key objective is the development and documentation of a workflow which incorporates appropriate elements of both digital design and expressive human skill and intuition. The production of sample tiles is the means to demonstrate the workflow. The success of the projects will be gauged along two trajectories:
- The system designed: The project creates an enjoyable and robust design experience, encouraging sustained practice and interaction.
- The work produced: The project results in the making of compelling and novel design artifacts which reflect the hybrid explorations.
Resources
Running molds. Custom profiles combined with custom sled tracks or mechanisms can produce both straight or curved extruded forms.
Polyurethane molds. Patterning for molds can incorporate a wide variety of materials, digitally fabricated forms, and handwork. If your idea would require the use of multiple molds or extremely large molds, please consult with the instructors.
Plaster molds. Convex plaster forms can be molded using a rigid plaster mold given suitable release agents. This is especially applicable to larger curves used as base forms.
Troweling and tooling. Hand tools for plaster are used to render flat and textured surfaces. The addition of mechanism or custom jigs could add a systematic form to the treatment of surfaces with trowels, combs, and brushes.
Green plaster carving. Plaster in the initial stages of curing can be carved or cut.
Color and inclusions. Plaster can be painted or also tinted using dry-powder pigments. Objects or granular aggregate material can be incorporated directly in wet plaster.
Idiosyncratic forming processes. There are boundless possibilities for casting plaster using ad hoc or single-use molds, or rendering onto armatures or lath forms. E.g., plaster could be cast directly into natural soil impressions.
Composition and accretion. Individual plaster elements can be assembled with other objects and worked material, either into mold patterns or directly into final artifacts.
Digital fabrication. Laser-cutting, 3D printing, CNC milling, algorithmic Grasshopper modeling, and parametric CAD.
dFAB Robot Lab. The workflow could include robotic manipulation of plaster. However, due to the short timeline, we discourage significant development of novel end-of-arm tooling. Please check with the instructors if you have questions about scope or feasibility. Groups working with the robot will need at least one member already certified to use the lab.
dFAB Motion Capture. The lab supports capturing tool trajectories in both batch mode and real-time. In batch mode, the system can generate a CSV file of rigid-body trajectory data for multiple objects, suitable for post-processing in Python or Grasshopper. For this project timeline, we discourage real-time interaction systems. Tool capture involves creating a custom marker fixture for the tool, calibrating the cameras and defining bodies, then developing a protocol for recording short well-defined movements.
Deliverables
- a report delivered as a post on the course blog including
- discussion of the system objectives
- a description of the design process in use
- video clip documenting the design process
- photos documenting the fabrication process
- two physical plaster tiles at scale to fit the site
Schedule
- Wed Feb 5: project release, team formation
- Mon Feb 10: Museumlab site visit
- Mon Feb 17: prototype review
- Mon Feb 24: in-class project presentations
Prompts
A central thesis of Human Machine Virtuosity is that human skill can be deeply expressive in a way that is complementary to the precision and scalability of digital design tools. This is a middle path between pure traditional craft and industrial manufacturing, which uses mostly standardized processes.
For each workflow, a central question is identifying and locating the full decision process in space and time. A central tension exists between the abstracted decisions involved in CAD and algorithm and the embodied, tactile decisions involved in physical skill. So for example, if a candidate process is fully resolved during the digital fabrication stages, it is worthwhile to consider how meaningful decisions could be incorporated into plaster rendering process.
Modularity is a powerful heuristic for adding discrete tactile choices. So for example, a system of compatible shapes could be independently fabricated and then composed at final scale. Similarly, a mold with removable parts could defer decisions to the casting stage and generate a combinatorial design space.
Some degree of randomness is intrinsic to physical media, especially semi-liquids like curing plaster. This could be accentuated using deliberately random gestures such as allowing plaster to form free-flow layers, using drip application, or shattering cured material. These processes can require a great deal of tactile skill to create fully-considered effects in the midst of stochastic outcomes.
Site Context
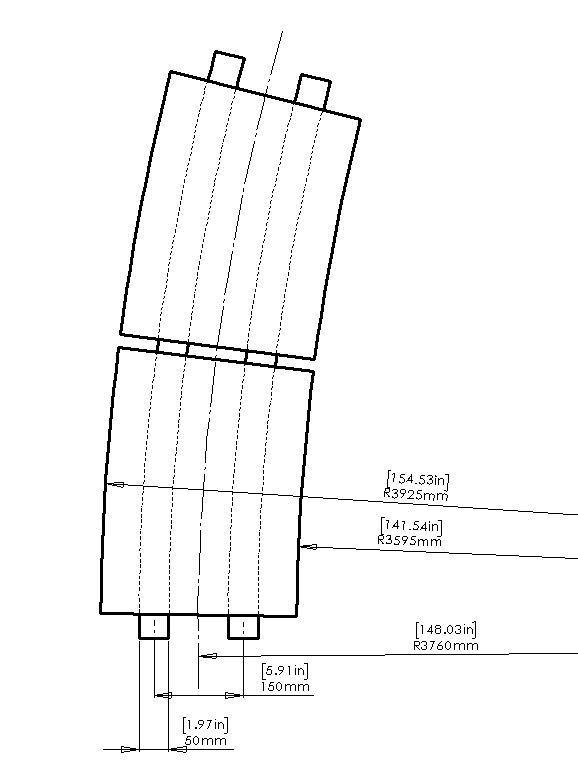
The purpose of your system is to produce one or more tiles which fit within an annular segment of the face of the arch in the studio lab. The exact dimensional specifications will be updated after we take measurements during the site visit.




Dimensions
The critical bounding box dimension for the tile is the 13″ maximum radial width. The arch is approximately circular; for short segments a circular edge should be fine. We measured the circular diameter at 283 inches on the inside edge of the face. The length is not critical, the template below assumes an arc length of approximately 18″.