I took inspiration from this painting called Rainy Day. Boston (1885) by Childe Hassam

In this piece, the artist sought to transport the viewer to Boston’s South End at the intersection of Columbus Avenue and Appleton Street. This piece evokes a sense of calmness and nostalgia in the viewer, even though the viewer has not been born until well after this painting was created. Viewing the piece, with the hyper-realistic American Impressionism style, almost allows the observer to feel as though they are surrounded by the horse-drawn chariots, stepping through the puddles, and seeing a light brown sky after sunlight breaks through shortly after a rainfall. This is a work of American Impressionism.
A theme that I took from this piece was ‘transportation’. Some ideas that I had were transporting the viewer to a particular scene using animated soft robots, potentially using soft technologies to create a soundscape (ie audio transportation as opposed to visual transportation), and using soft technologies to represent a transformation in clothing. For this last idea, I thought of soft robots that could be sewn into an item like an 1800’s women’s dress, which is high-waisted and long at the skirt. The robots that are sewn into the skirt portion could compress, hitching the skirt up, and a robot that is sewn in the waist portion could be actuated in some way to bring down the waist.
To explore this idea, I looked into research in soft robotics origami structures. A paper by researchers at The Ohio State University and Georgia Tech describes a ‘Stretchable origami robotic arm with omnidirectional bending and twisting’. An innovation that was described was the embedded magnetic particles in the soft robotic arm, which was comprise of individual segments of soft dual silicone plates. Each segment could be individually controlled by its particles when the robot was placed in a magnetic field.
This could translate to parts of clothing being sewn with magnetic particles that are encased in silicone, which would then ride up or down depending on how the magnets were attracted to or repulsed by each other. I still don’t know how I would apply the magnetic field, but this is an interesting alternative to pneumatic actuation, which would require an external actuator as well as a fluid like air or water.

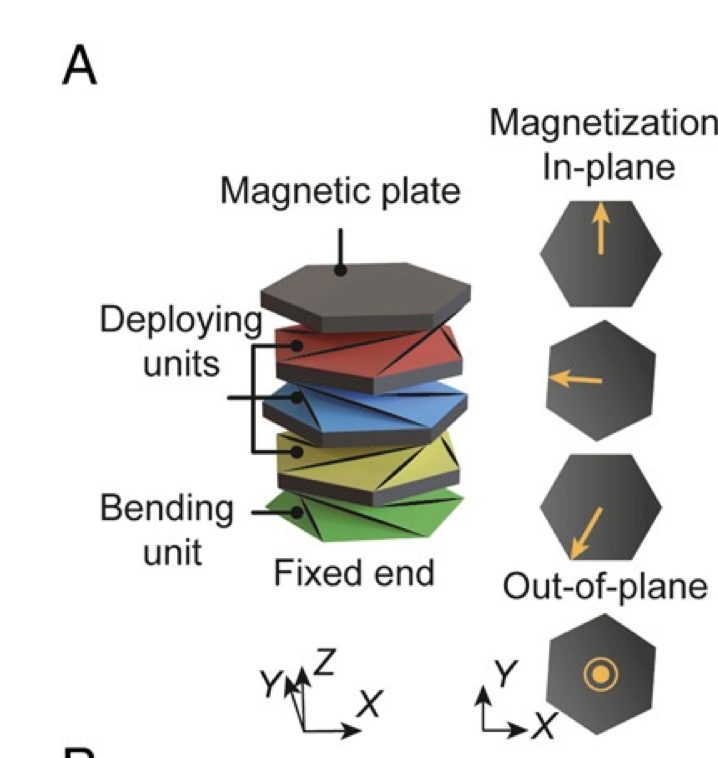
Stretchable origami robotic arm with omnidirectional bending and twistingShuai Wu, Qiji Ze, Jize Dai, Nupur Udipi, Glaucio H. Paulino, Ruike ZhaoProceedings of the National Academy of Sciences Sep 2021, 118 (36) e2110023118; DOI:10.1073/pnas.2110023118