Introduction
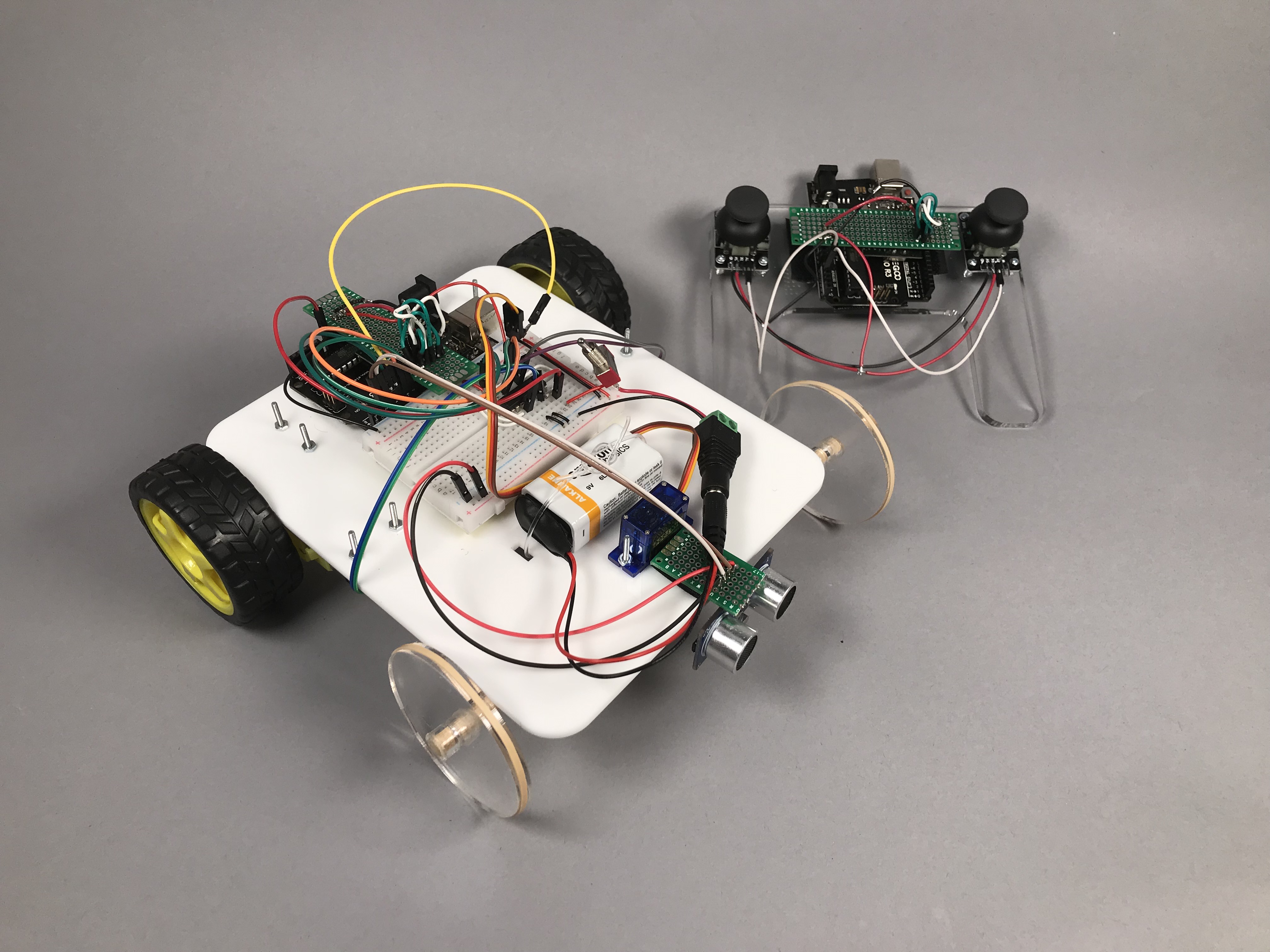
The emergency braking RC car is a wireless, radio controlled car that will brake before crashing in to any walls in front of it. The car is controlled by two Arduinos that communicate by radio, one taking input from two joysticks on the controller and the other from an ultrasonic sensor mounted on the front of the chassis.
Assembly
The chassis was laser cut with holes to attach the various necessary components. The motor mounts were 3D printed and the motors were snap fitted into the mounts. The motor mounts and servo motor were mounted on the chassis with screws and bolts, but the Arduino and other electronics were mounted with velcro for easy replacement.
The radios were soldered to protoboards along with pin headers to create a custom Arduino shield for easily connecting the radio. This was important because the radio requires 8 connections, and losing any one of them would result in wasted time finding and reconnecting the wires. The motor control electronics were wired on a breadboard which the motors were then plugged into.
The controller was made in a similar way: laser cut with holes to mount the joysticks and a space to mount the Arduino using velcro.
Electronics
The NRF24L01+ radio allowed for further range and easier wireless connection than using Bluetooth. The motor driver was the Texas Instruments L293DNE, wired in a configuration allowing control of both speed (using PWM) and direction (using digital outputs) for two motors. Steering was achieved by attaching the front axle to the servo arm, and controlling the servo with PWM. The HC-SR04 ultrasonic sensor allowed for detection of objects in the way of the vehicle. The vehicle’s Arduino reads this sensor and, if any objects are detected, will ignore any “forward” commands until nothing is detected.