Exercise: Servo Sweep¶
Objective¶
Control a hobby servomotor module.
Hobby servos are feedback-controlled motors which move an output shaft to a specified position. Internally they use a potentiometer to measure the actual position. The internal circuit compares the actual and commanded position and generates positive and negative motor current pulses to operate a tiny gearmotor. They are a very convenient modular way to create controlled physical motion.
The commanded position is specified using a specific format of PWM in which pulses with duration approximately 1-2 ms repeat at approximately 50 Hz. The different pulse widths correspond to different positions. Note that this a significantly different waveform than the motor PWM, since the duty cycle is always very low, i.e., the pulse on-time is always much shorter than the cycle time.
Steps and observations¶
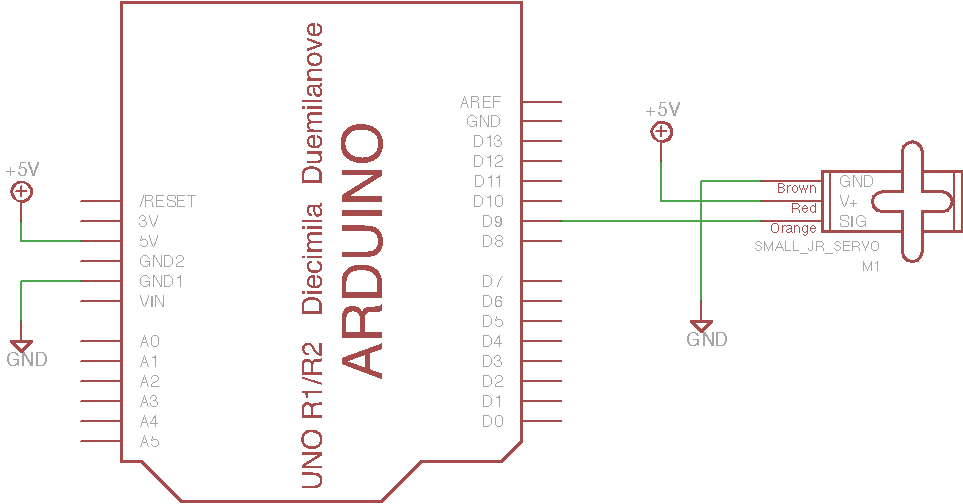
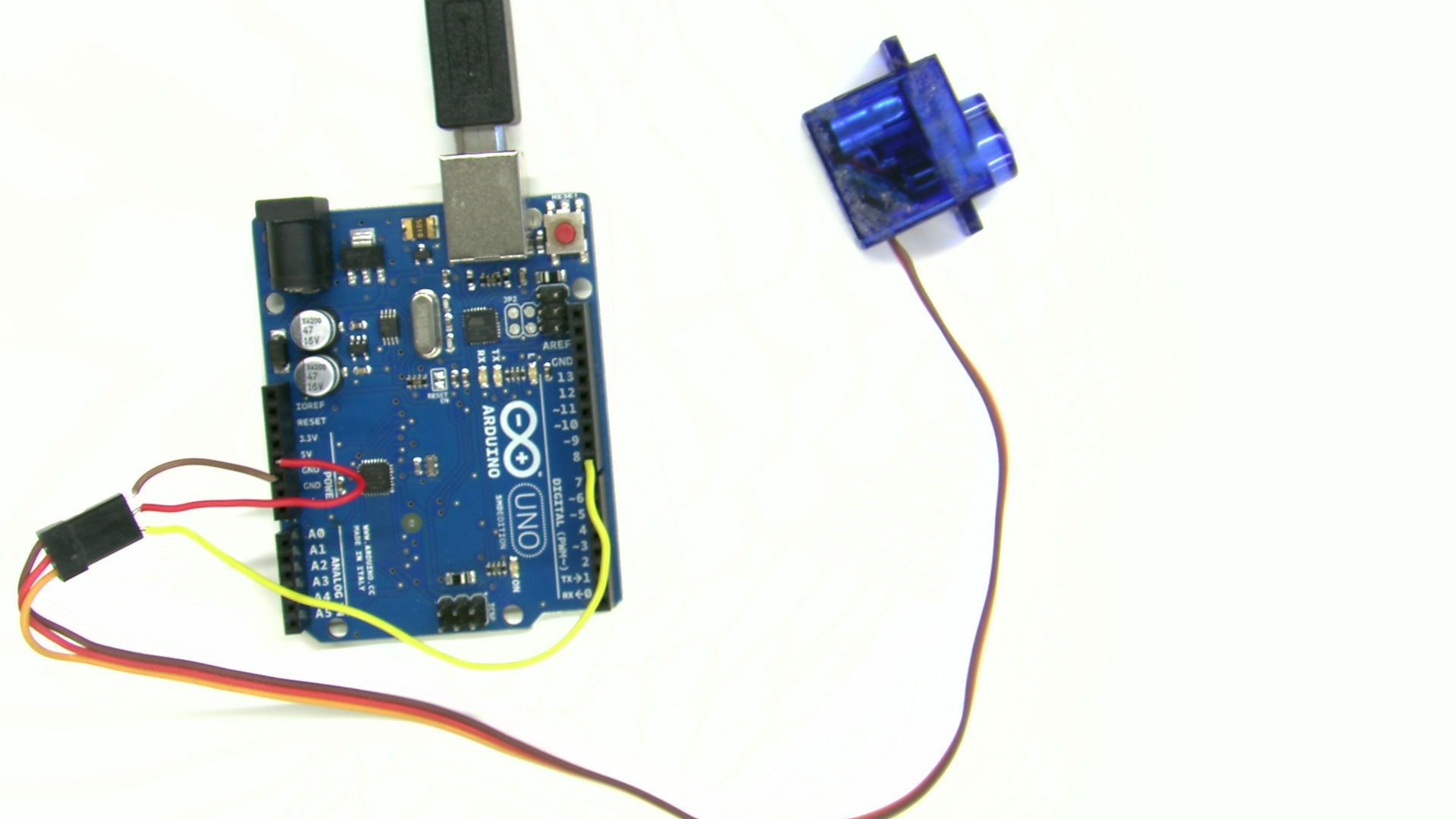
- Wire up a servo to the Arduino. It is easiest just to use jumper wires directly from the servo connector to the Arduino heades.
- Load and run the ServoSweep sketch. This examples uses the Servo library included with the Arduino IDE.
- Observe the different demonstrations of servo motion.
- Observe the PWM command signal on the oscilloscope.
- Try varying the parameters controlling the motion limits and speeds.
- Determine the maximum speed possible.
Comments¶
Note that trajectories and speed control are only possible by issuing position commands at intervals.
As a challenge, rewrite the program to avoid delay() and operate two servos simultanously on different trajectories. This will be taken up in more detail in an upcoming exercise.
Suggested Layout¶
Arduino Code¶
- Documentation: ServoSweep Arduino Sketch
- Sketch Folder: ServoSweep
Other Files¶
- EAGLE file: servo-sweep.sch