
1A – Basic Circuits Project – The Anti-Social Robot
|
The Team Group Members: Annabelle Lee, Jeff Houng, Ruben Markowitz Roles: Annabelle Lee as the Scribe, Jeff Houng as the Integrator, Ruben Markowitz as the Designer
The Video
Introduction Presently, technology is a huge driving force behind progress and human development. Despite all that technology has helped us accomplish, it also plays a different role in our lives. It engrosses us with an endless barrage of information, wanted or not. The Anti-Social Robot serves as a statement about the dark side born when human behavior meets technology. As each one of us embrace our niche in technology – video games, online shopping, videos, social media – we spend interacting with others in real life. Even as we send each other sociable fragments on the Internet, we’re slowly distancing ourselves from each other. The Anti-Social Robot mimics and translates this distancing into a literal and observable form. As you approach the little man engulfed with technology, he invariably drifts away from you, trapped alone in his little bubble. A rangefinding sensor triggers two motors to move the man away from you. Technical Notes The electronic components of the robot consist mainly of a Sharp 2Y0A21 IR rangefinding sensor and a general purpose NPN transistor. The power supply is a LiPo 3.7V battery, which powers the electronics and 2 5v DC motors with built in gear boxes, with a ratio of 143:1, to increase torque. The body of the robot is 1/8″ Masonite for the structure, and 1/8″ PMMA clear plastic for the display. These parts were laser cut to enhance precision.
The Image Documentation 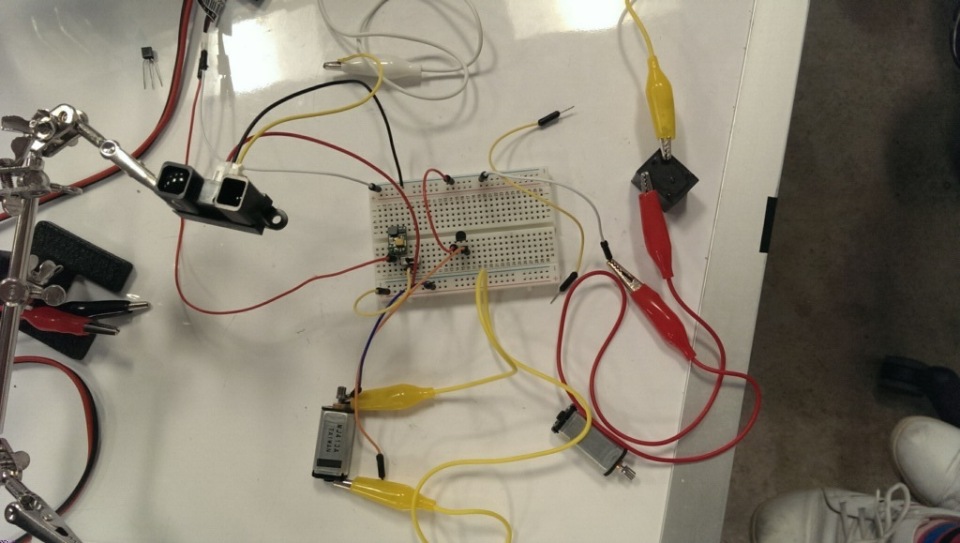 This is a photo of our circuit as we were setting up a previous version. From the left, counterclockwise: the sensor (black box), the motors (two small metal cylinders), and the relay (small black rectangle). We did not end up using the relay after altering our concept.
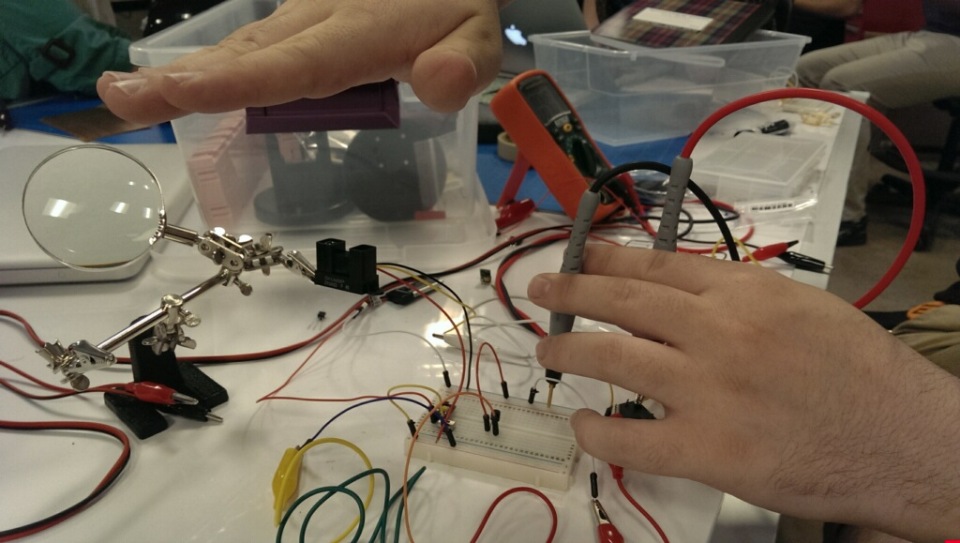 Here, we test the sensors.
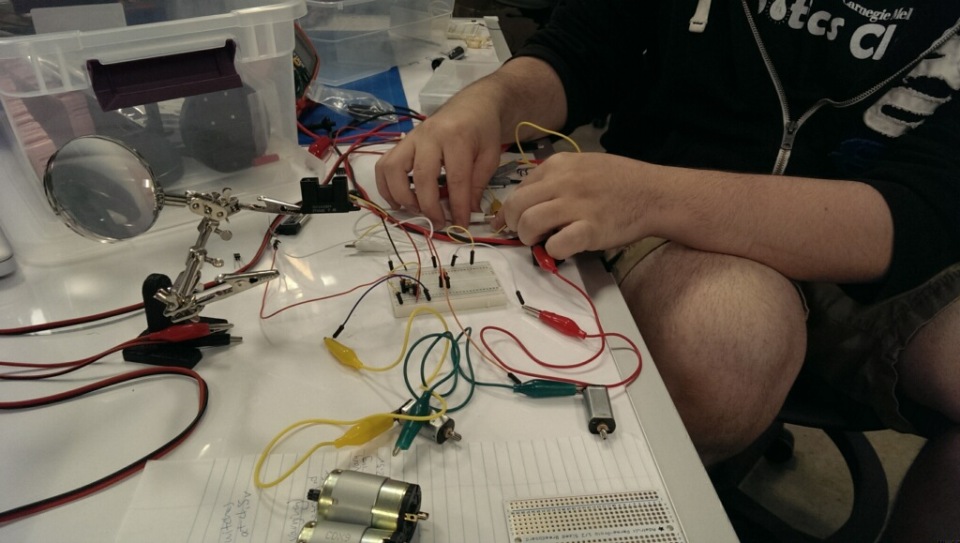 Ruben tinkering with the circuit.
 We experimented with various motors before finding the right ones.
 A picture of our circuit at the final stage. We changed the motors to more powerful ones because the weaker ones would not propel the robot. On the left, we also have our battery.
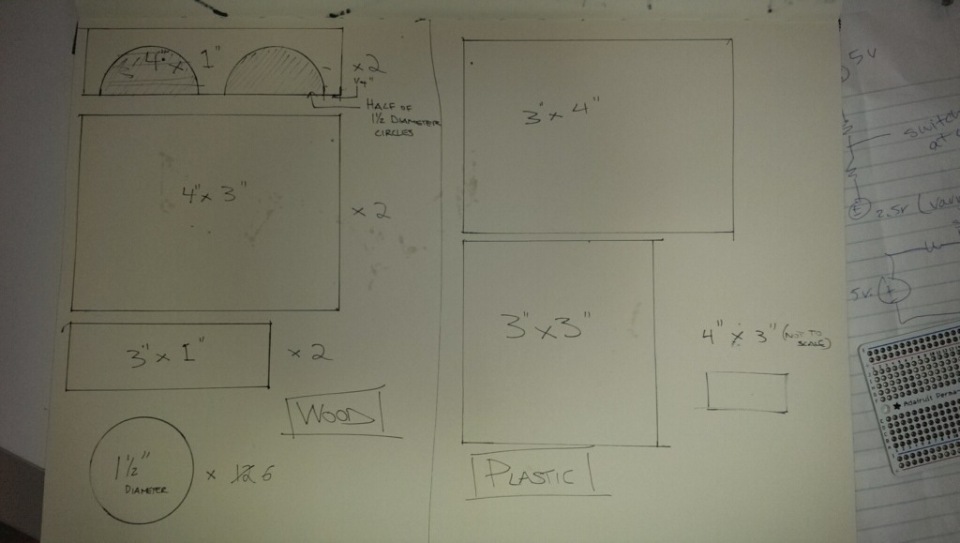 A picture of the dimensions of the robot. On the left are the dimensions of the bottom carriage, in wood. The semicircles are cutouts for the wheels. The circle is the cutout for the wheel. On the right are the dimensions for the clear shell.
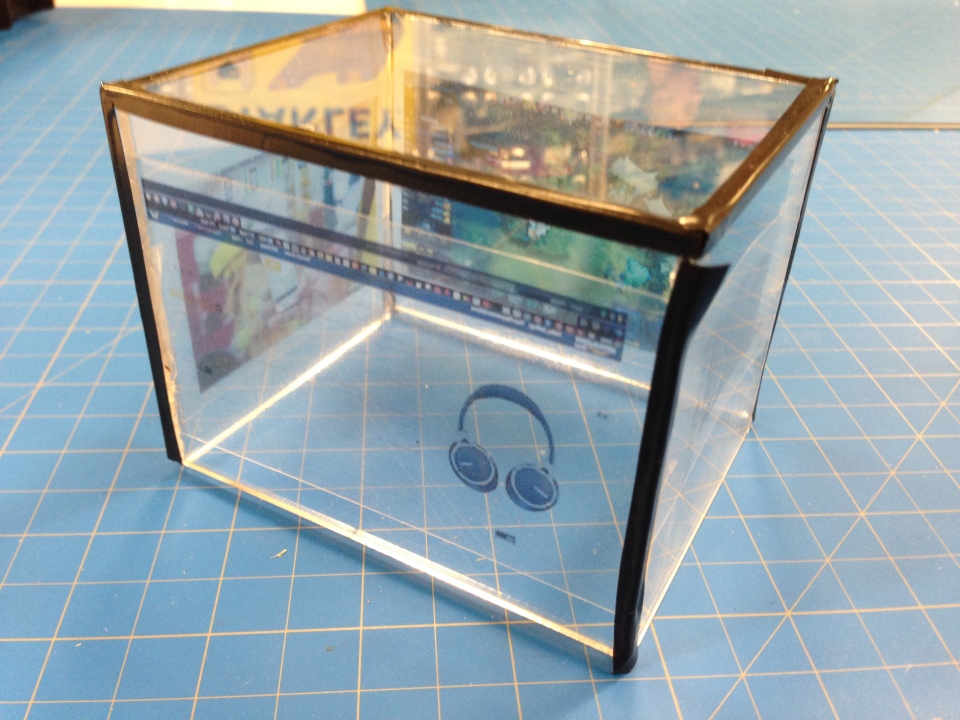 Pasted onto the technology shell are transparencies with various technologies we access most commonly today. On this side is Facebook and Amazon.
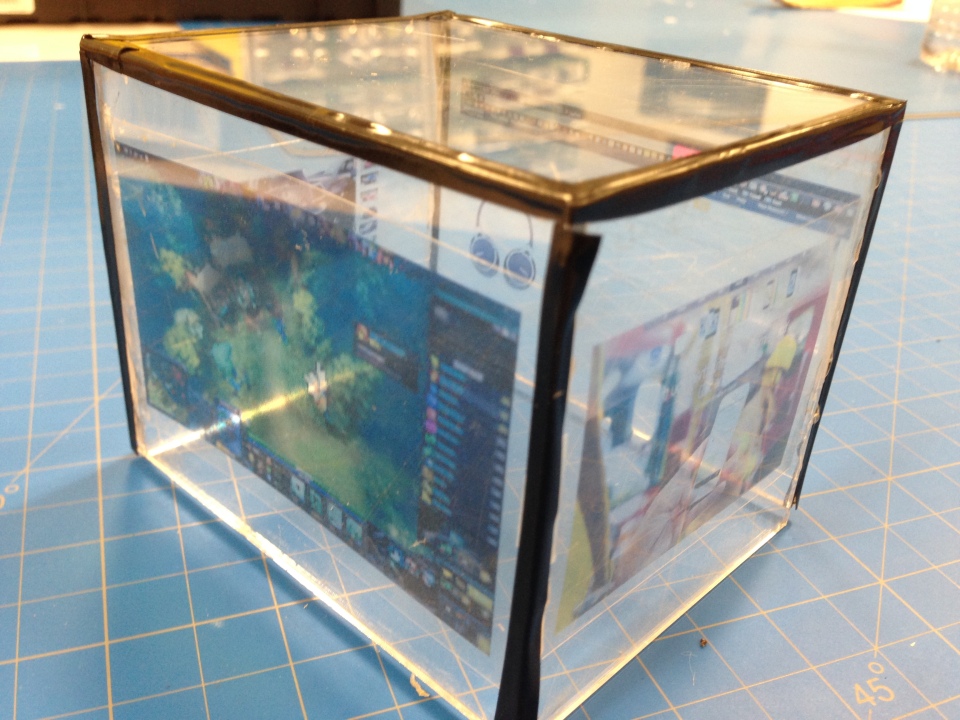 On this side is a video game and the Apple page.
 And here, you see the man multitasking, juggling video games, Facebook, and Amazon.
 Here, you see the man and a video of a car’s steering wheel.
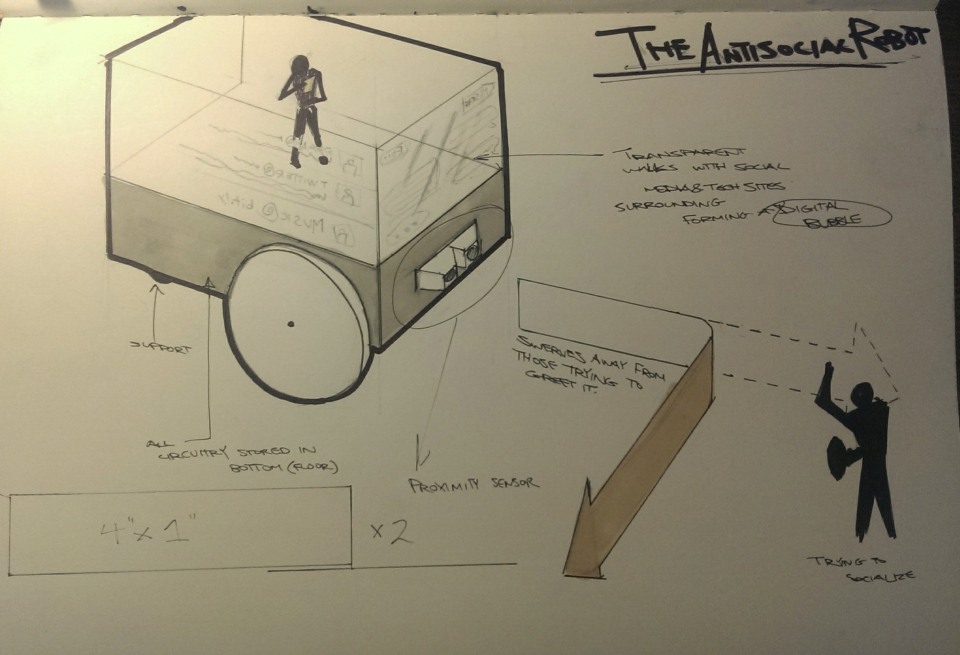 The initial concept was to have the robot swerve away from the approaching sociable friend. However, due to technological limitations, we altered our idea to having the robot run away from the friend instead. This change has also slightly altered the meaning of the concept. |