
Autonomous Robot Part 2 – Search
|
Group Members (and Roles) Annabelle Lee (Scribe and Designer) Joe Mallonee (Designer and Tutor) Riya Savla (Integrator and Designer)
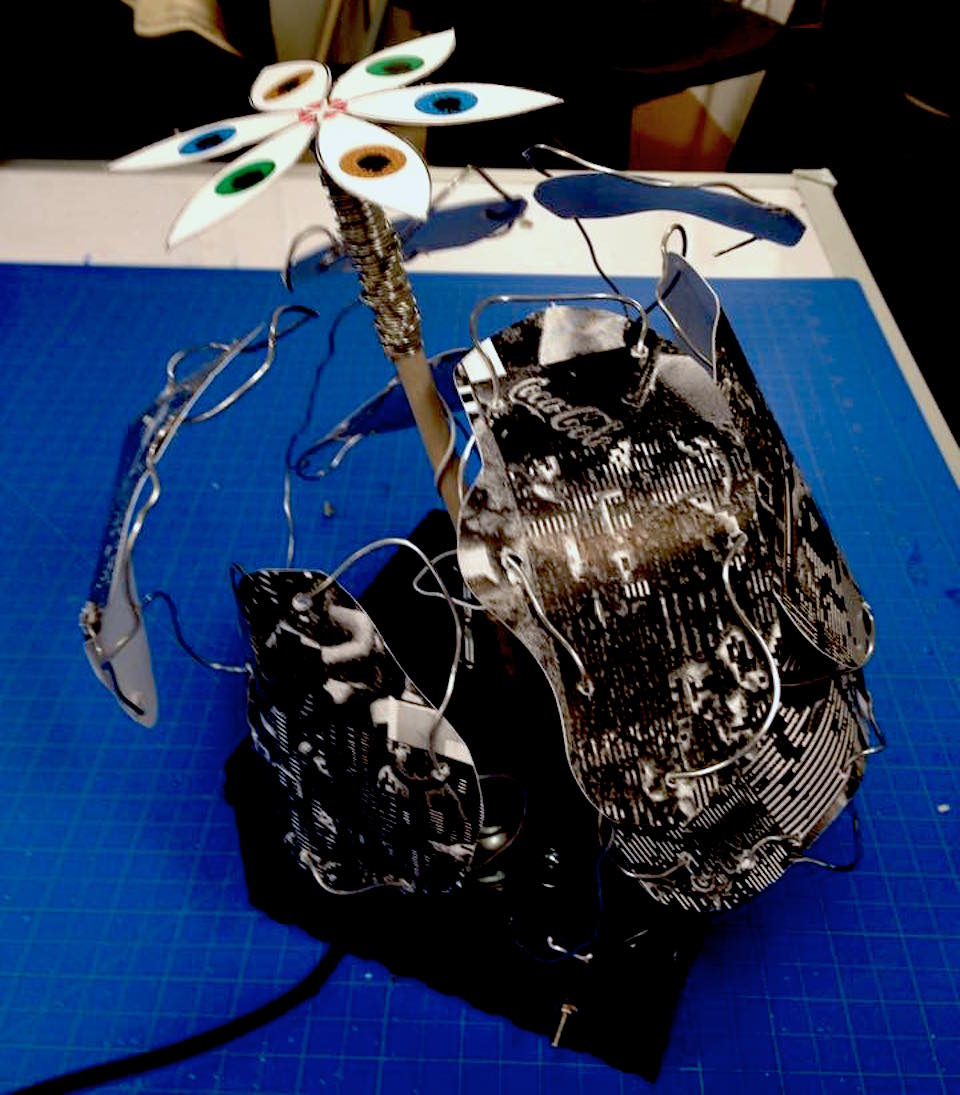
Introduction Our project centers around the idea of finding substance in a world where Coca Cola can steal ground water, use fossil fuels to ship their products around the globe, and still have a polar bear as an advertising mascot. The eye flower continuously moves, looking out at the surrounding environment and avoiding contact with the Coca-Cola advertisements.
Technical Notes The advertisements are suspended by metal wire which runs into the Arduino’s ground pin. The flower is hooked up to a pull-down resistor and given five volts. When the wire wrapped around the stem touch the grounded shapes, it sends a signal to a digital input pin (pin 2). This allows us to detect movement and send the flower in the reverse direction. 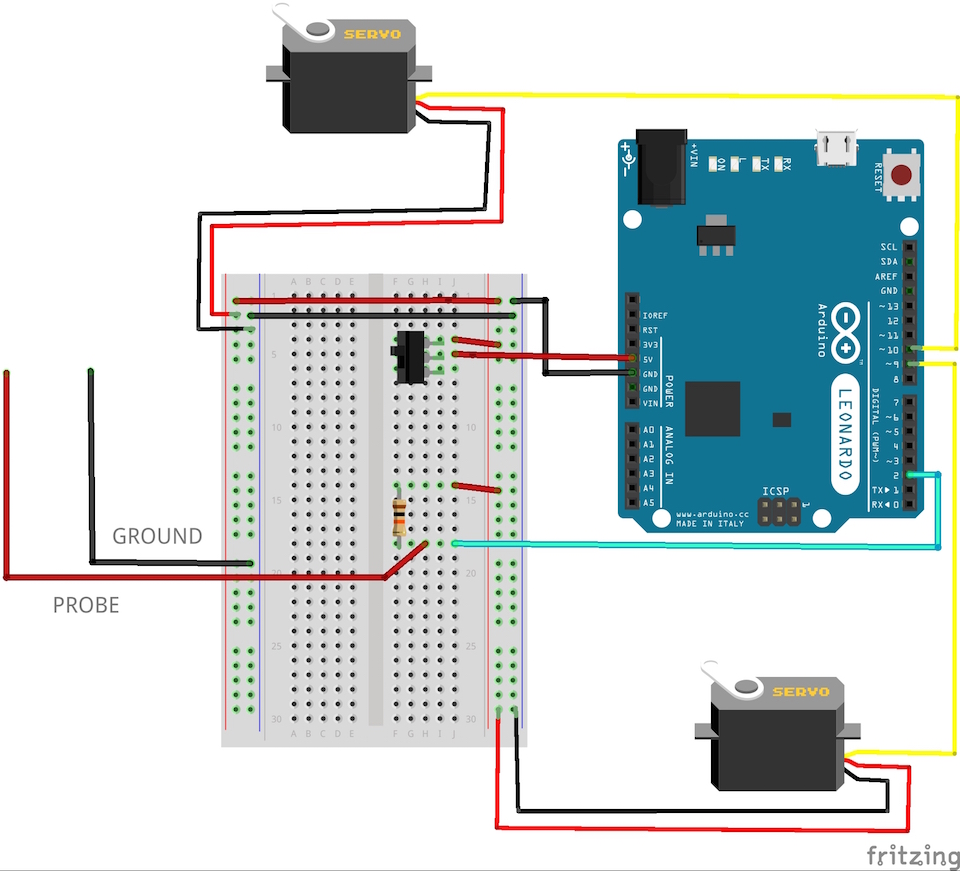 Above: Parts used are Arduino, breadboard, two servos, high resistance resistor (10k ohms), switch. Two wires (probe and ground) run out to their correct respective mechanical components.
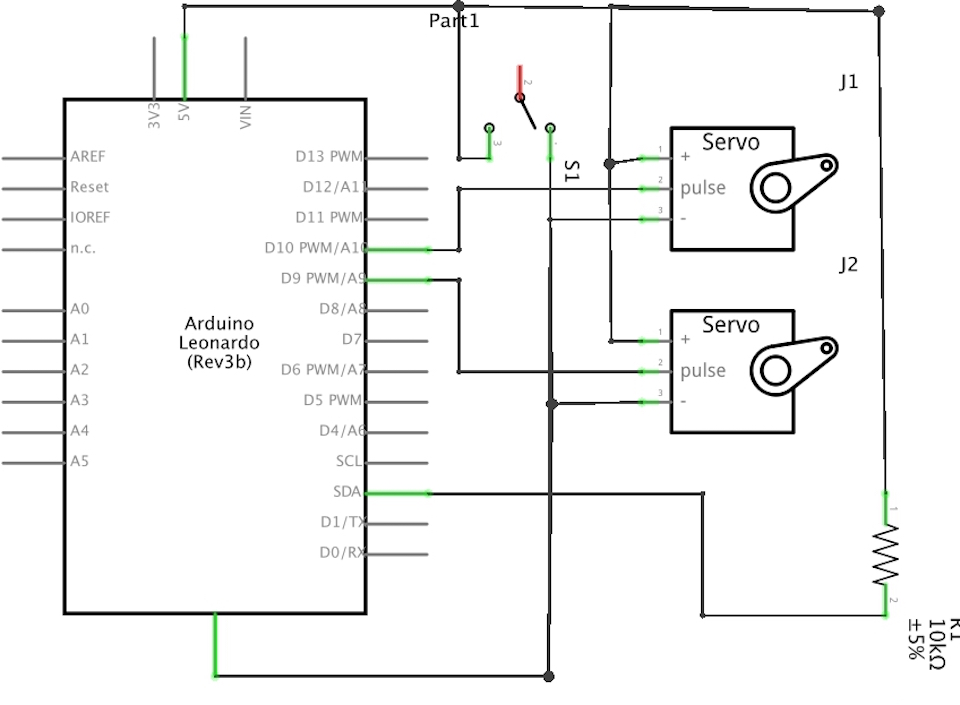 Schematic Arduino Code //setup servo variables and values const int contactPin = 2; // the number of the pushcontact pin long lastContactChangeTime = 0; void setup() { pinMode(contactPin, INPUT); Serial.println(millis() – lastContactChangeTime); if ((reading == HIGH) && (((millis() – lastContactChangeTime) > noMoreChangeDelay))) if((val_up <= lowerbound_up) || (upperbound_up <= val_up)) { if((val_down <= lowerbound_down) || (upperbound_down <= val_down)) { val_up = val_up + inc_up; delay(20); Structural Aspects The flower’s movement is the result of two servos controlled by an Arduino. One of them alternatively rotates clockwise and anti-clockwise. It rotates a disk, through which a shaft sits. The second servo sits on top of this shaft and supports and controls an arm. Thus we get trace out a spherical path with the two servo arms mimicking the longitude-latitude system. The shaft and the top servo are balanced with the help of multiple acrylic disks that rest on low-friction spherical balls.
Images  Above: Flower In Coca Cola World
 Above: Top View
 Above: Side View |