Autonomous Robot Part 3 – Tapeworm
|
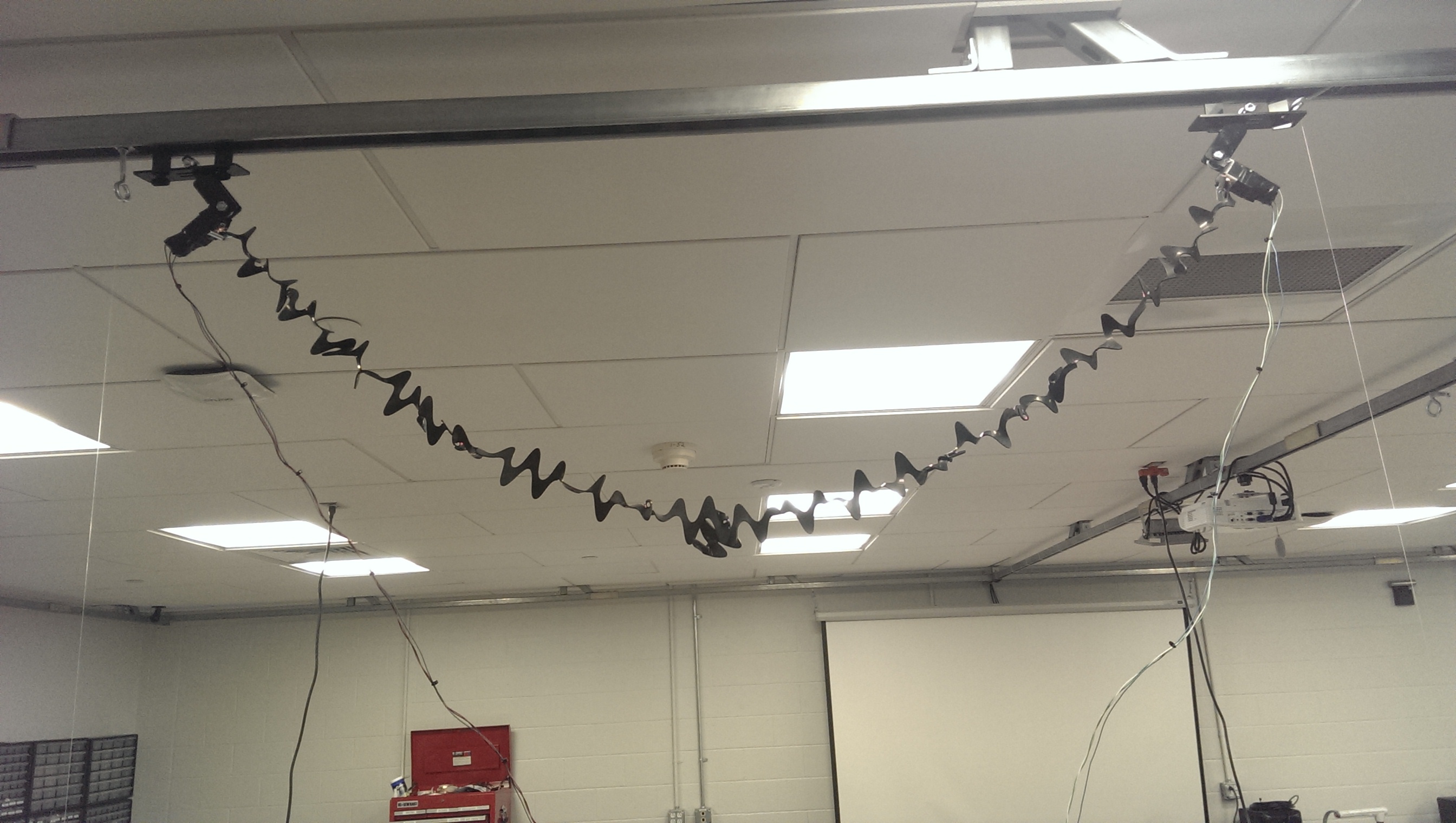
Team Members: Miles Peyton, Jeffrey Houng Introduction: In this age of robots becoming smarter and smarter, where they are starting to emulate living and natural behavior, we wanted to create an autonomous robot that exemplified organic and natural movement. Through this study, we found conductive rubber that was laser cut in a zig-zag pattern, that when twisted, has a very odd, almost gross nature to it, building up tension and whipping itself through the air as if it had character to it.
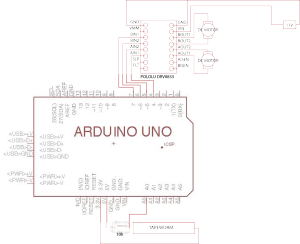
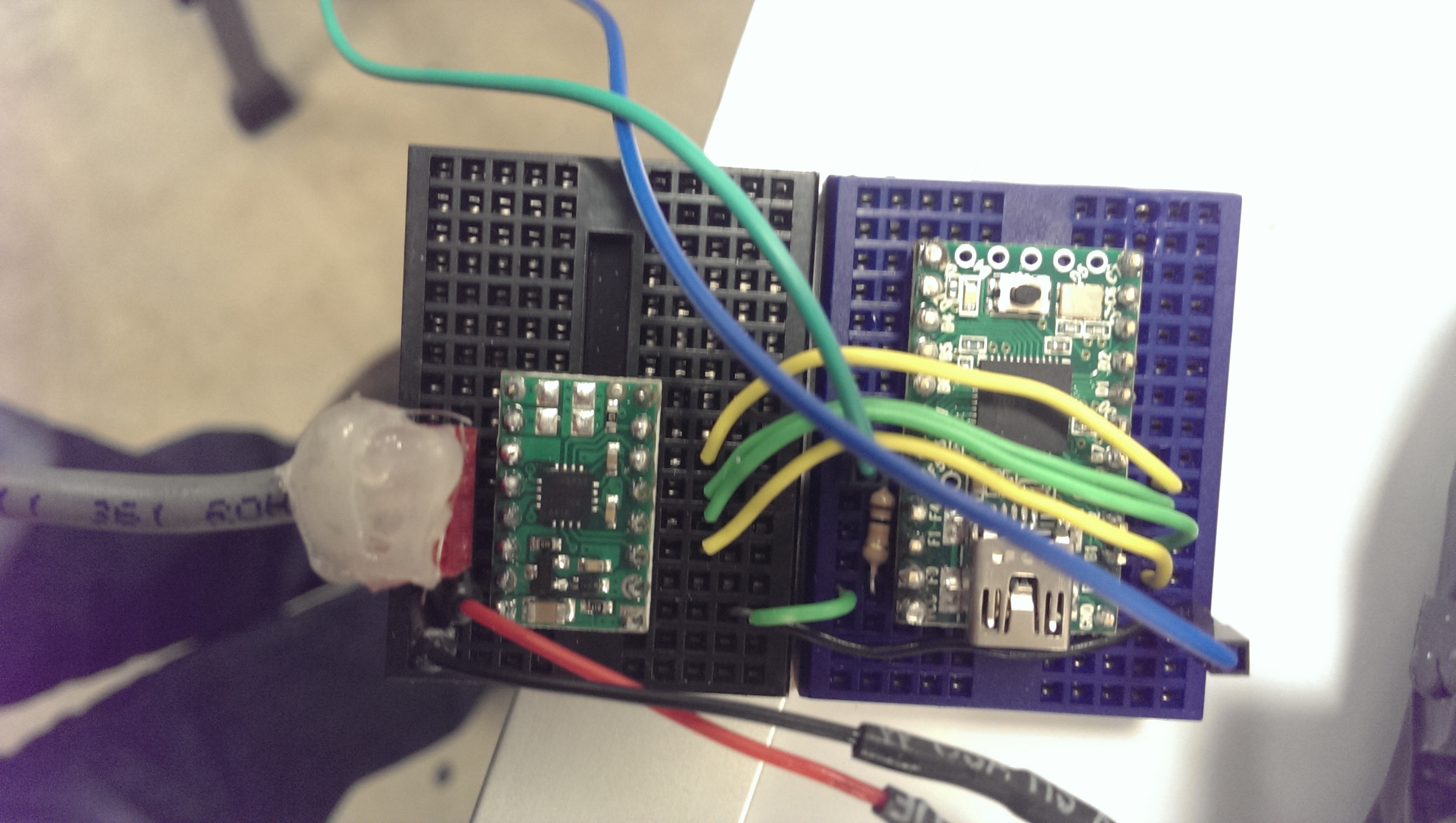
Technical Notes: We use a Pololu DRV8833 dual motor driver to control two DC motors. The tapeworm consists of a length of laser cut conductive rubber whose resistance varies with tangling. A simple voltage divider circuit with a 10 kΩ resistor senses the changing resistance of the rubber. A custom slip ring connects the tapeworm to the circuit. An Arduino Teensy 2.0 microcontroller manages the logic of system – it senses tangling, and either continues twisting in the same direction, or reverses the direction of twisting. The microcontroller is powered by a computer via USB, and the motor driver receives power directly from the AC adapter. The two motors are secured to laser cut pieces, custom fit to a railing on the ceiling that provides a track for the motor cars. Weights hang at the end of the cars, and pull them apart during untangling.
|