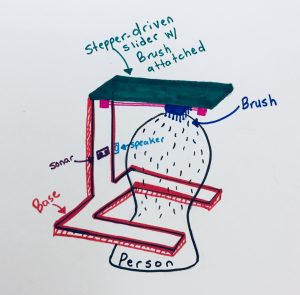
We are building a small machine that will brush a person’s hair. When a person gets close enough to the device, a hair brush attached to a stepper-driven slider will begin moving back and forth. An ultrasonic sensor will activate the device and a speaker will beep when the person is close enough to the machine. Below is a sketch of what the machine will look like.
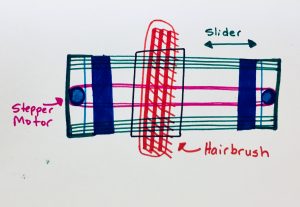
Here is a sketch of what the stepper-driven motor will look like with the hair brush attached to it.
Below is an image of our circuit along with some of the code we will be using.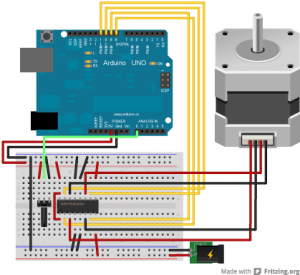
(https://www.arduino.cc/en/Tutorial/StepperOneRevolution)
//https://www.arduino.cc/en/Tutorial/StepperOneRevolution
/*
Stepper Motor Control - one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 - 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include <Stepper.h>
const int stepsPerRevolution = //!will depend on length of slider!;
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}
Leave a Reply
You must be logged in to post a comment.