Brainstorming
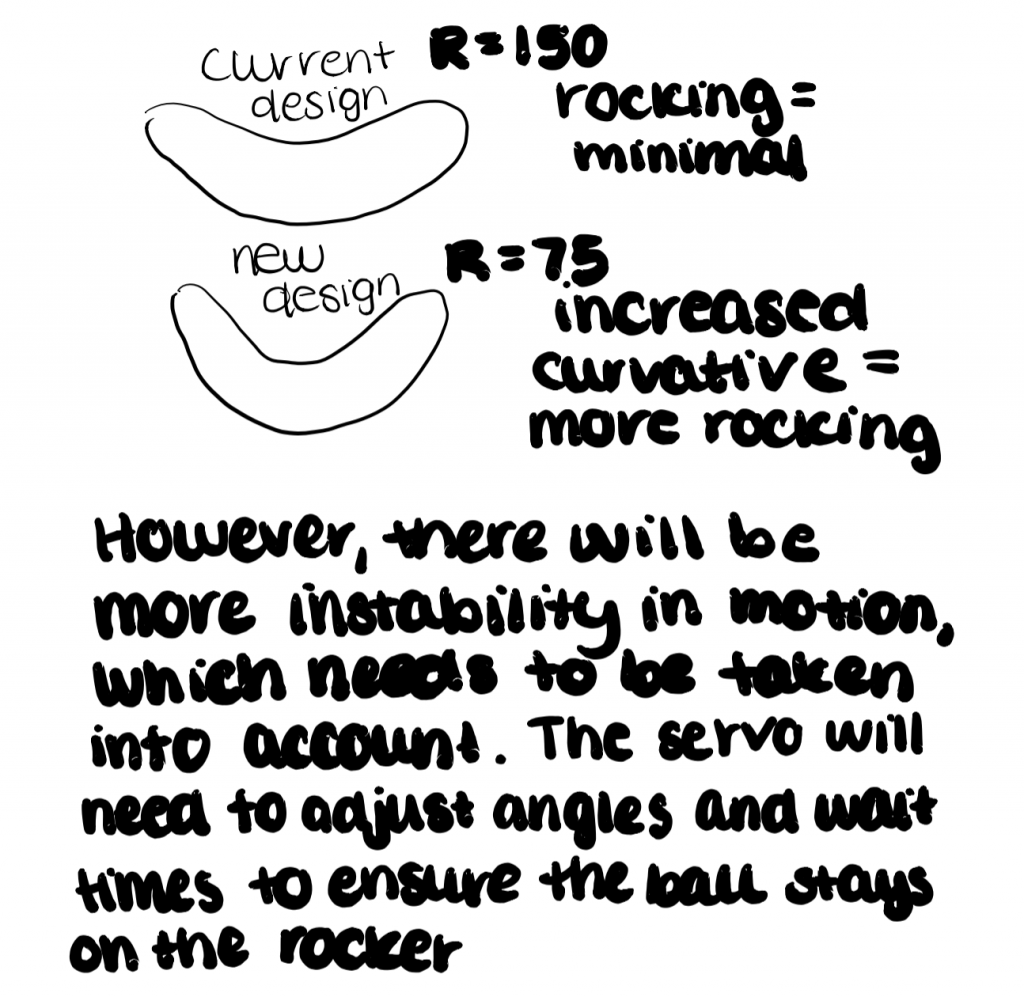
With no experience in SolidWorks, I decided to only modify the project a little, by reducing the inner radius by half. I was curious on how to adapt the ardunio code to account for the steeper curvature. Here are some of my brainstorming sketches:
Implementation
I had to file the rectangle for the servo a little, as my SolidWork file did not account for the size of the wires on the side of the servo.
My initial tests of the rocker produced little results. I attempted adjusting delay times and angle measures, but nothing seemed to make any significant changes.
There are multiple reasons for this initial failure. One, the curvature of the outer radius is not steep enough and thus, the torque of the servo does not produce enough force to move the rocker. In the future, I would most likely reduce the outer radius to make for more smooth motion. Second, the servo’s lever is not long enough to move the rocker. A longer lever would increase torque and would also push off the table more. I decided to address the second area of concern by attaching a tootsie roll to the lever. This created laughable yet somewhat workable results, as seen below.
The motion of the ball is obviously not smooth and the rocker almost tips over at some points. Looking back, I would most likely, like mentioned before, reduce the outer radius, add two servos rather than one, and preferably not use a tootsie roll as a lever.
Code
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9);
}
void loop() {
myservo.write(0);
delay(500);
myservo.write(300);
delay(500);
}
Leave a Reply
You must be logged in to post a comment.