Team: Yu Jiang & Max Kornyev
Narrative Description
Our project, the hands-free balance maze, is a mechanical marble maze that allows different remote control methods: via handsfree sensors or even a mobile app. The purpose of the project is to provide entertainment, propose a new method for interaction & control (with each hand or your phone’s tilt controlling an axis of movement), and to allow remote control of the device via the MQTT server. The game board can be installed anywhere as long as it’s laying on a flat surface; like a desk or floor.
The maze lies flat with the marble at the start position when no player is present. A player can start the game by simply placing his or her hands over the sensors. The proximity between each hand and each sensor determines the degree of tilting along the axis. The player then needs to get the marble ball to the endpoint while avoiding holes on the board that the ball can fall into. When the ball successfully reaches the end there might be a light or music component signaling the success. Whoever the audience is, they will enjoy the tricky challenge and remember the celebration at the end.
The project will be successful if the device can provide an entertaining experience for the user and that the user feels comfortable controlling the board remotely using the sensors or through a phone. User interaction is key.
Technical Outline
We are planning to make the game board using three layers of plywood boxes connected together using shoulder screws & ball bearings; very much like a Gimbal frame. Two hobby servos will be placed in between every two layers to enable rotation/tilting of the first and second inner boxes. These two servos are connected to two sonar rangers that convert input from different hands into tilting movement along the two axes.
Physical Design
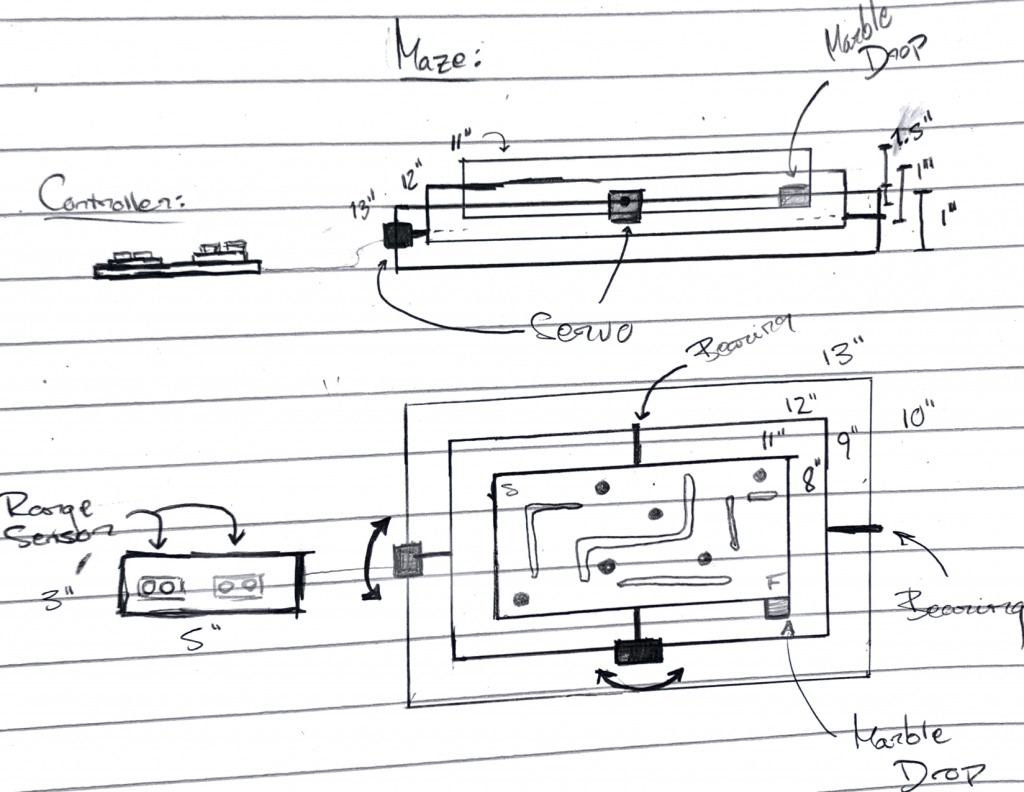
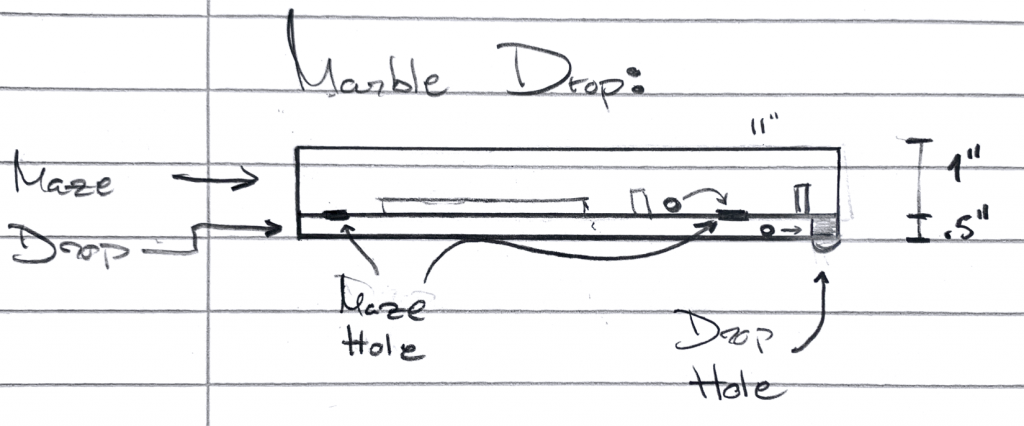
The innermost box will contain an empty bottom compartment, which will serve as the marble drop. Anytime the player’s marble drops through a hole on the maze surface, they will be able to tilt the board to one side and retrieve it easily.
The maze frame can be made lightweight by using press-fit 6mm laser cut plywood parts, which will enable relatively easy movement of the boxes by the two rotating servos. Shoulder screws and ball bearings will allow the boxes to rotate on their axes. Finally, two sonar rangers will be used as input sensors prompting servo movement, while a phototransistor can be used to sense when a marble reaches the maze finish.
Technical Challenges
Assembling all of these components together should not pose much of a challenge. But we’ve identified our most time consuming activities, and plan to iterate on these to perfect our final design.
- Maze design in Fusion 360
-it will take effort to design a good set of press fit maze parts
-need to be mindful of the component’s total weight - Sensor Smoothing
-a good user experience starts with algorithmically smoothing the ranger sensor input, so that the maze moves how the user wants it to move - Mobile App Design
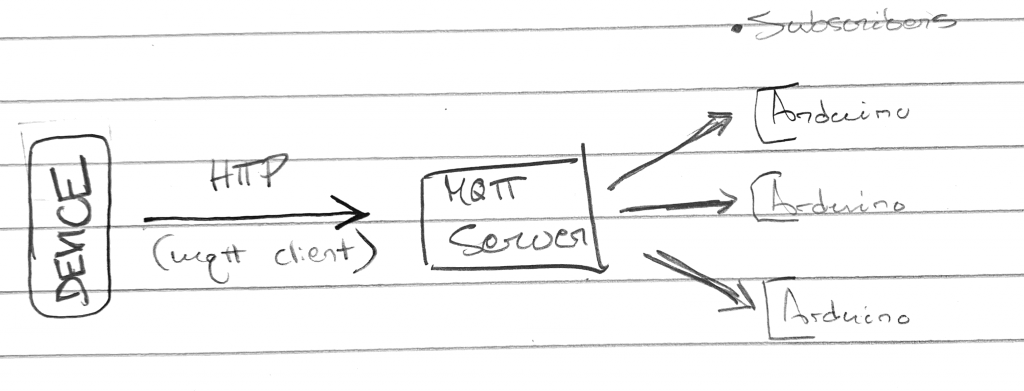
-need to repurpose the bridge program to have the user’s device connect to the MQTT server
-we will follow this high level design:
Leave a Reply
You must be logged in to post a comment.