We cut the pieces out of plywood for the table, 3-D printed some pieces, and completed the circuit. So far we only worked on one panel because we are still waiting on the pieces to be printed, but it works. Once we have all the 3-D printed pieces we can move forward with moving all four panels.
Sketches
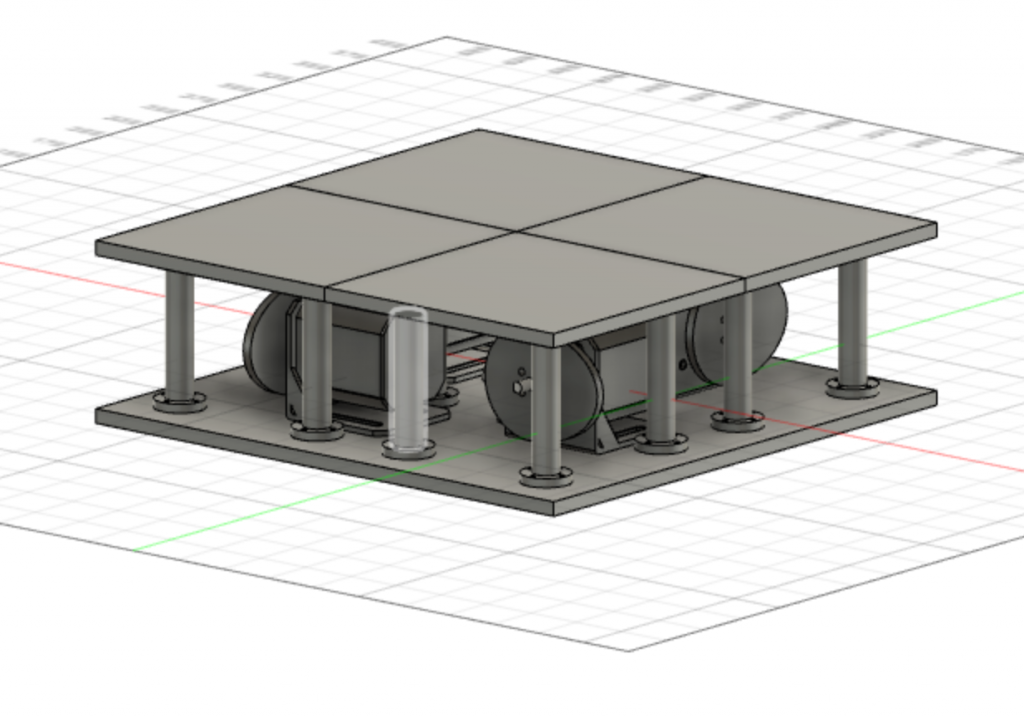
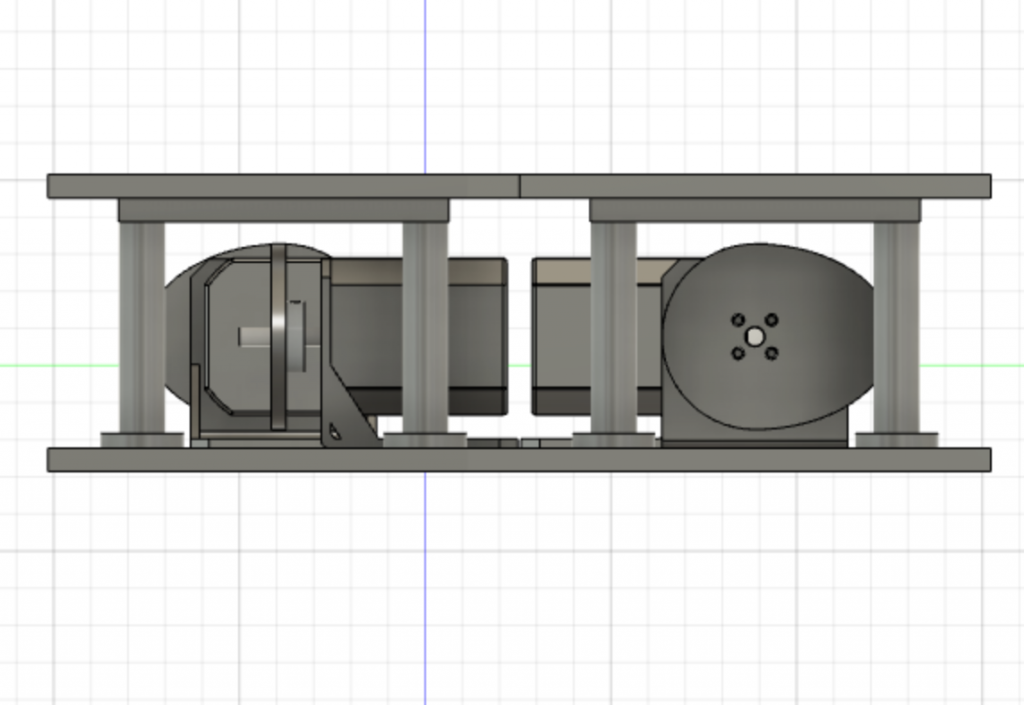
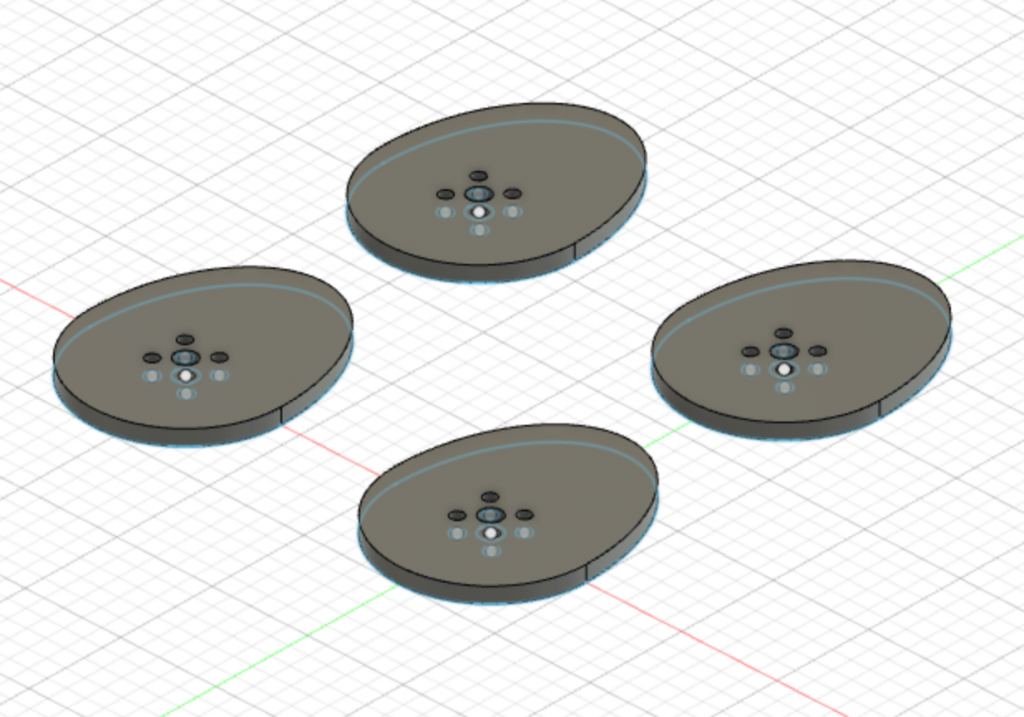
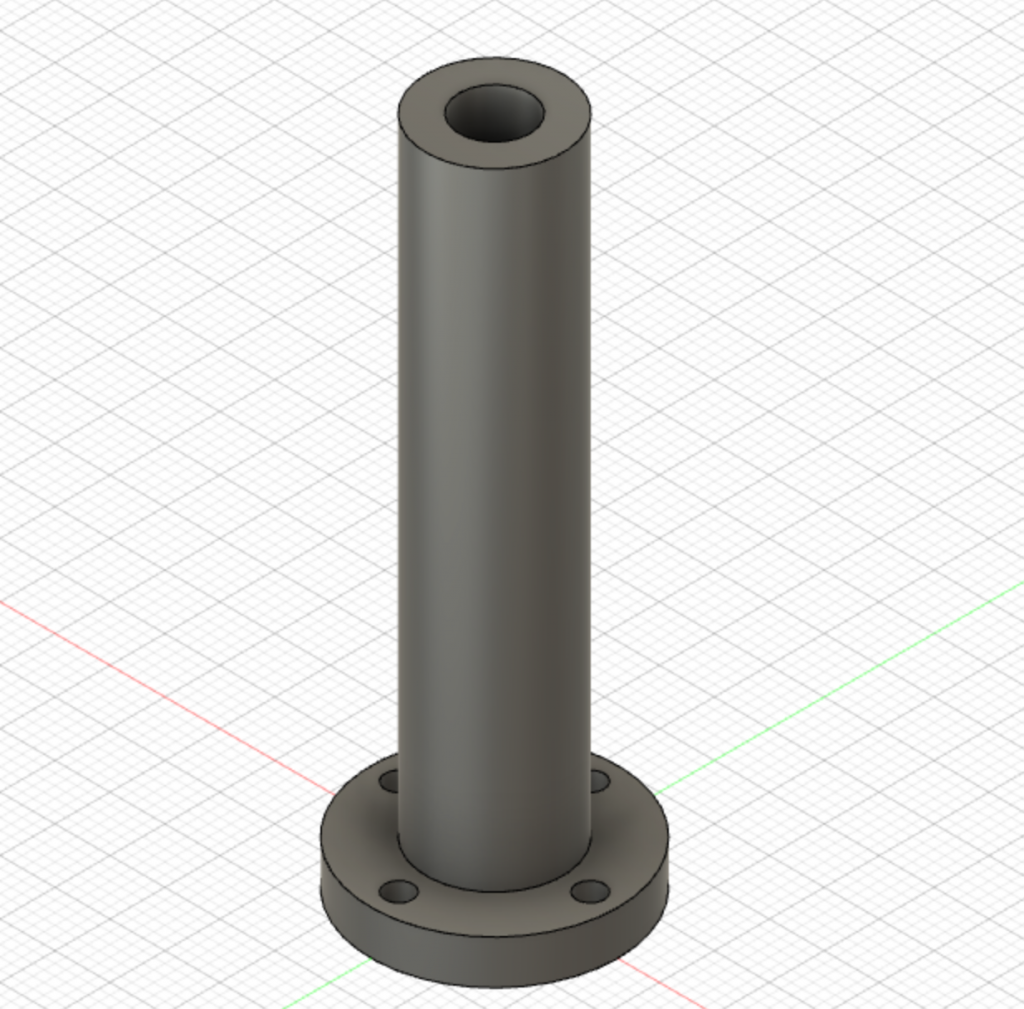
Below are renderings of the compartment and 3D-printed parts:
Compartment
3D Printed Parts
Technical Specifications
The current setup uses an Arduino Uno and Arduino Nano. The Arduino Uno controls a CNC Shield which drive the 4 Stepper Motors. The Arduino Nano polls the Force Sensitive Resistors and sends info to LED’s and the Arduino Uno. Once an FSR’s analog reading is within a certain range, the Nano will send data to the Arduino Uno through analog pins and the “Wire.h” module. The Uno updates the stepper motors when data is received. Below is the code for the Nano and Uno:
Nano (Master):
// Include the Arduino Stepper.h library:
#include <Wire.h>
const int aA = 0;
const int aX = 1;
const int aY = 2;
const int aZ = 3;
const int ledA = 2;
const int ledX = 3;
const int ledY = 4;
const int ledZ = 5;
// Array for LEDs in following order [a,x,y,z]
boolean leds[4] = {false, false, false, false};
void setup() {
Wire.begin();
pinMode(ledA, OUTPUT);
pinMode(ledX, OUTPUT);
pinMode(ledY, OUTPUT);
pinMode(ledZ, OUTPUT);
}
void loop() {
hardware_input_poll();
}
void hardware_input_poll(void)
{
poll_sensor();
}
void poll_sensor(){
// Read the analog input.
int aVal = analogRead(aA);
int xVal = analogRead(aX);
int yVal = analogRead(aY);
int zVal = analogRead(aZ);
transmit(aVal, 0);
transmit(xVal, 1);
transmit(yVal, 2);
transmit(zVal, 3);
poll_lights();
}
void transmit(int value, int index){
if ( (value >= 500) && (value <= 1000) ) {
if (!leds[index]){
leds[index] = true;
Wire.beginTransmission(4); // transmit to device #4
Wire.write(index*2);
Wire.endTransmission();
}
} else {
if (leds[index]){
leds[index] = false;
Wire.beginTransmission(4); // transmit to device #4
Wire.write(index*2+1);
Wire.endTransmission();
}
}
}
void poll_lights() {
if (leds[0]){
digitalWrite(ledA, HIGH);
}else{
digitalWrite(ledA, LOW);
}
if (leds[1]){
digitalWrite(ledX, HIGH);
}else{
digitalWrite(ledX, LOW);
}
if (leds[2]){
digitalWrite(ledY, HIGH);
}else{
digitalWrite(ledY, LOW);
}
if (leds[3]){
digitalWrite(ledZ, HIGH);
}else{
digitalWrite(ledZ, LOW);
}
}
Uno (Receiving)
#define enable 8
#define xDir 5
#define yDir 6
#define zDir 7
#define aDir 13
#define xStep 2
#define yStep 3
#define zStep 4
#define aStep 12
#include <Wire.h>
int aPrev = 1;
int xPrev = 3;
int yPrev = 5;
int zPrev = 7;
int steps = 3200;
int stepDelay = 300;
void setup() {
Serial.begin(9600);
pinMode(xDir,OUTPUT);
pinMode(xStep,OUTPUT);
pinMode(yDir,OUTPUT);
pinMode(yStep,OUTPUT);
pinMode(zDir,OUTPUT);
pinMode(zStep,OUTPUT);
pinMode(aDir,OUTPUT);
pinMode(aStep,OUTPUT);
pinMode(enable,OUTPUT);
digitalWrite(enable,LOW);
Wire.begin(4); // join i2c bus with address #4
Wire.onReceive(receiveEvent);
}
void loop() {
delay(100);
}
void step (bool dir, byte dirPin, byte stepperPin, int steps) {
digitalWrite(dirPin,dir);
delay(100);
for (int i = 0; i < steps; i++){
digitalWrite(stepperPin, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(stepperPin, LOW);
delayMicroseconds(stepDelay);
}
}
void stepY (bool dir){
if (dir) {
step(true,yDir,yStep, 800);
delay(2000);
}else {
step(false, yDir, yStep, 800);
delay(2000);
}
}
void stepX (bool dir){
if (dir) {
step(true,xDir,xStep, 800);
delay(2000);
}else {
step(false, xDir, xStep, 800);
delay(2000);
}
}
void stepZ (bool dir){
if (dir) {
step(true,zDir,zStep, 800);
delay(2000);
}else {
step(false, zDir, zStep, 800);
delay(2000);
}
}
void stepA (bool dir){
if (dir) {
step(true,aDir,aStep, 800);
delay(2000);
}else {
step(false, aDir, aStep, 800);
delay(2000);
}
}
void receiveEvent(int howMany)
{
int x = Wire.read();
Serial.println(x);
switch (x) {
case 0:
if (aPrev != x) {
aPrev = x;
stepA(false);
break;
}
case 1:
if (aPrev != x) {
aPrev = x;
stepA(true);
break;
}
case 2:
if (xPrev != x) {
xPrev = x;
stepX(false);
break;
}
case 3:
if (xPrev != x) {
xPrev = x;
stepX(true);
break;
}
case 4:
if (yPrev != x) {
yPrev = x;
stepY(false);
break;
}
case 5:
if (yPrev != x) {
yPrev = x;
stepY(true);
break;
}
case 6:
if (zPrev != x) {
zPrev = x;
stepZ(false);
break;
}
case 7:
if (zPrev != x) {
zPrev = x;
stepZ(true);
break;
}
}
}
Leave a Reply
You must be logged in to post a comment.