For the final iteration of our project, we finished adding the finishing touches.
In terms of the code, we added saccade motion. A saccade refers to the sudden, quick, simultaneous movement of both eyes in the same direction. In the code this was implemented as shown in the image below.

The trick to this was determining what was considered a saccade motion. Since saccade motions are typically quick and sudden jolts of both eyes, if we had to map every saccade motion to an arduino movement, it would result in the same issue as before, where too much data is being sent to the arduino in too little time. Thus, I created a filtering system to only acquire the saccades in which the ending position of the pupils relative to their eye were roughly in the same position. Based on the data and tweaking the value around 5 was a reasonable number used to determine whether the distances of the pupils were relatively close to one another.
Here is the link to the github: https://github.com/mdunaevs/Eye_Tracking
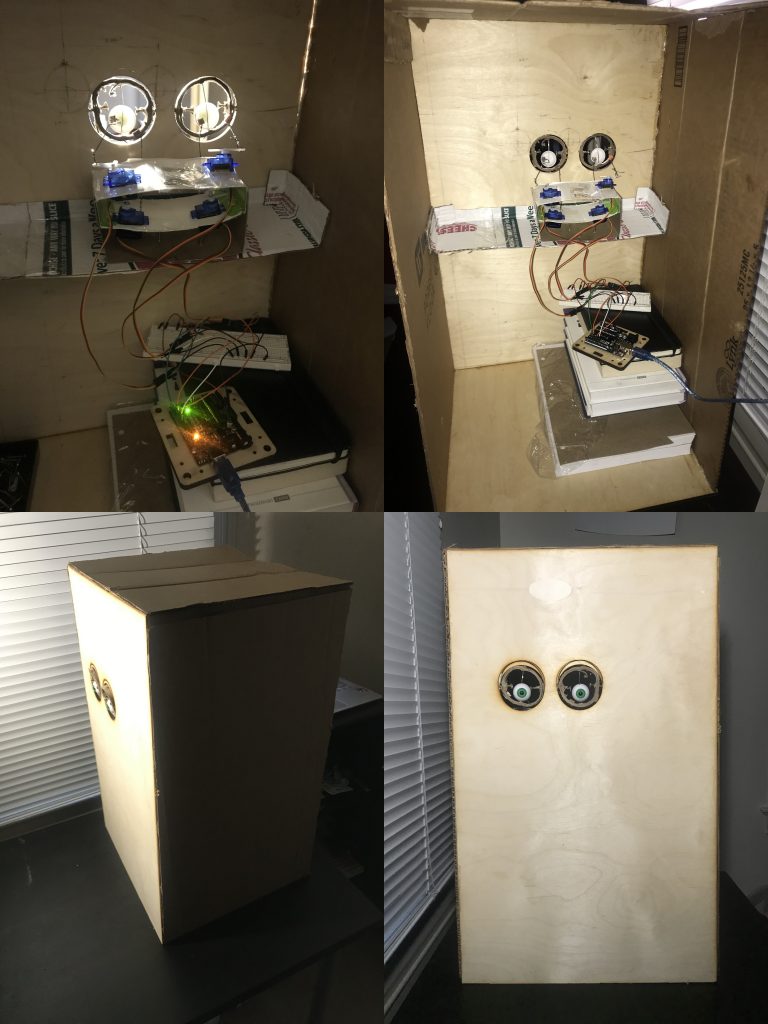
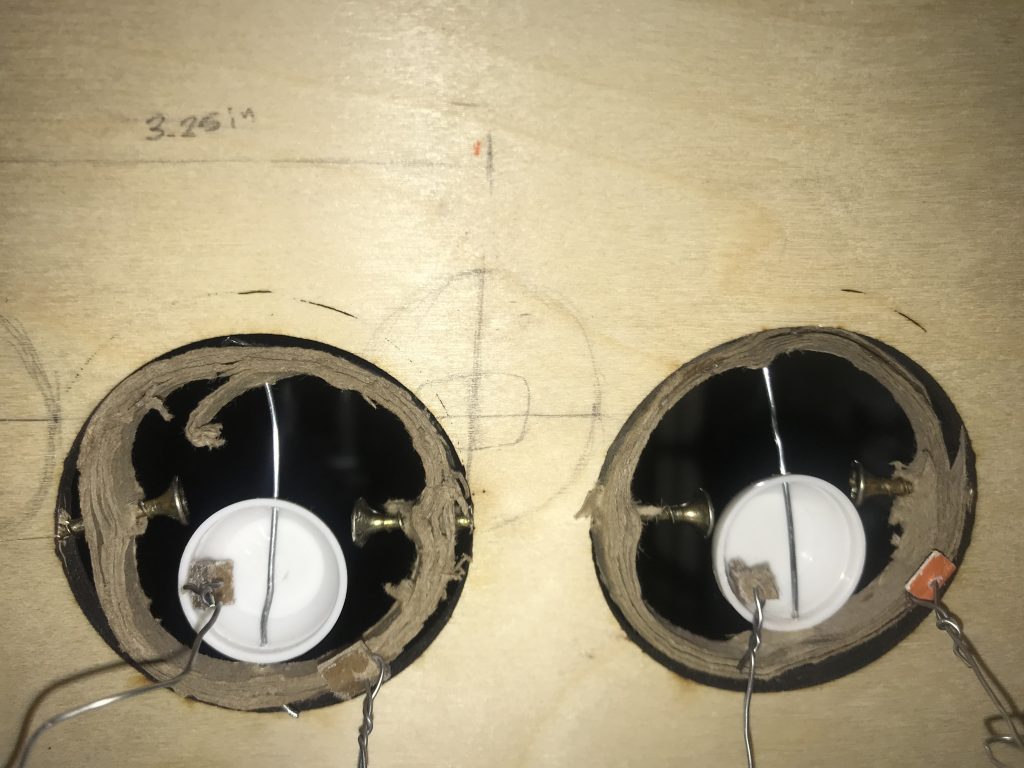
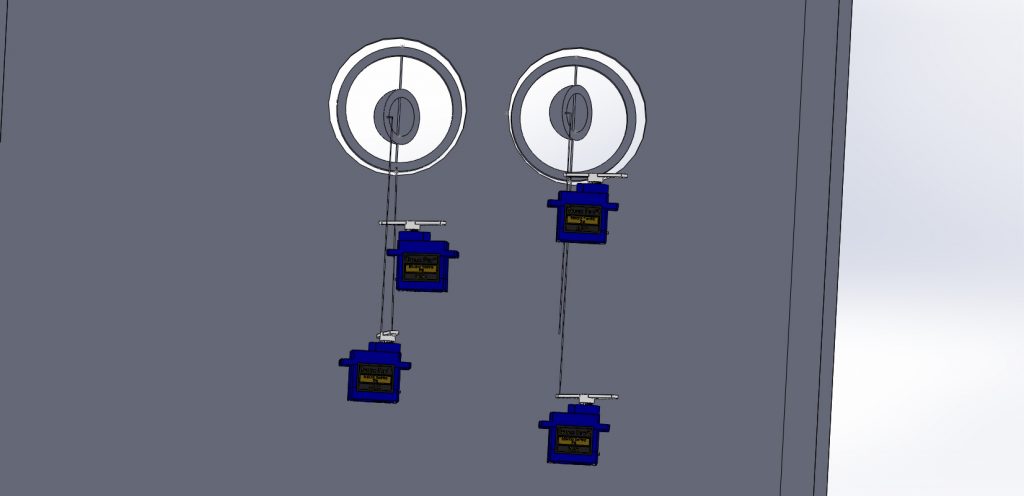
For the mechanical components:
Since we had previous issues with the eye materials for last time, we replaced the clay eyes with plastic eyes, and replaced the paperclip linkages with solder wire. This allowed for the mechanism to move more easily.

Leave a Reply
You must be logged in to post a comment.