 Main Idea
Main Idea
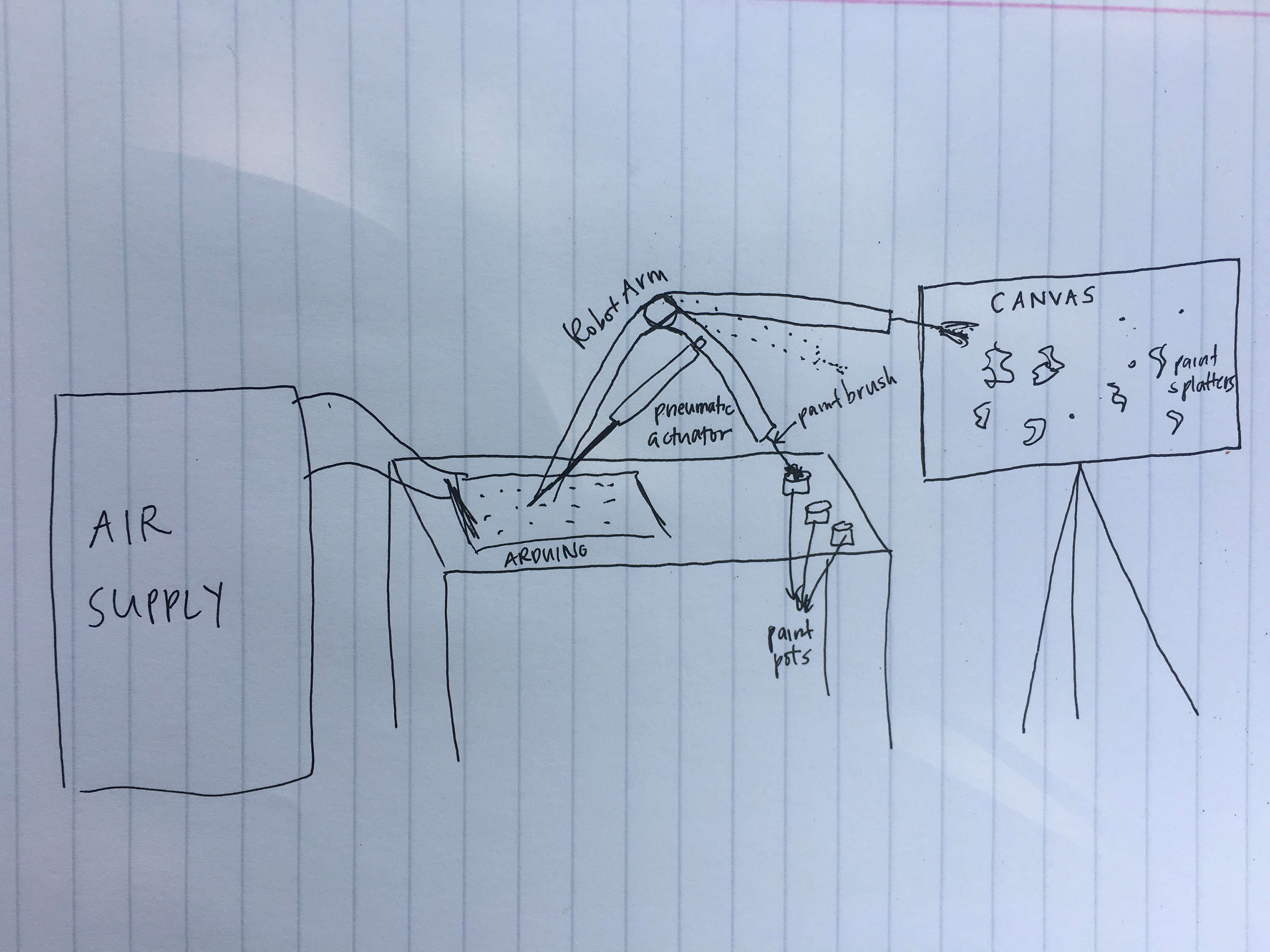
The main idea behind the project is to create a robot that will create artwork similar to Jackson Pollock’s work. The machine will be a robotic arm that works in two dimensions: one parallel to the canvas it is interacting with in order to choose different paint colors, and one perpendicular to the canvas to splatter the paint onto the canvas. The object will be the paint and canvas. Each repetition of the splatter, the robot will randomly choose a paint pot to dip into, then splatter some paint onto the canvas with a randomly targeted location. One of the paint pots must be white so that the robot can work continuously and the robot can still be producing new splatters that don’t just look like one big blob, as the robot’s performance will have a beginning but hypothetically no end.
Narrative
The robot will go through the repetitive motion indefinitely. It’s not meant to mass produce similar artworks, but rather to continue working on the same piece forever. The robot might speak to the repetitive motions of humans, who may think that each motion brings some indeterminism and change to the bigger picture, but in reality each motion changes nothing. Even after the entire canvas is covered again by new splatters, it will still be similar and have no real impactful changes. There is no sense of success versus failure. Because the outcome is not deterministic, it will not be possible to label some outcomes as successful or failing. The agency is somewhere in the motion of the arm as well as the physical setup of the machine–how far the canvas is from the arm, how hard the paint is splattered, and so on. But a lot of the agency is also based on the randomness of the machine.
Materials and Implementation
For materials, we will need paint (whatever kind of paint is runny, opaque, and/or dries fast), two pneumatic actuators with the setup that we explored in class, as well as the physical components to construct the robot arm (see diagram). Because the concept is pretty open, we can probably cut a lot of corners on the implementation of the robot. For example, how many paint pots we want available can easily be adjusted based on how easy it is to make a robot arm that moves in two dimensions.
Comments are closed.