The specific feeling that we are trying to evoke is inter-species compassion. We are attempting to create empathy in the viewer toward the robot in the scene. The mannerisms and actions of the robot when presented with different challenges in the scene will hopefully make the viewer want to help the robot. Our robot will be a four-legged, animal-like robot with motors that spin the legs around to create forward motion. We will also add “cute”, animal features to the robot in an attempt to make the robot more adorable.
For the body of this robot, we will use either wood, acrylic, or aluminum so that it can be shaped fairly easily by basic machining processes. This way, we can add the aforementioned animal-like features easily as well.
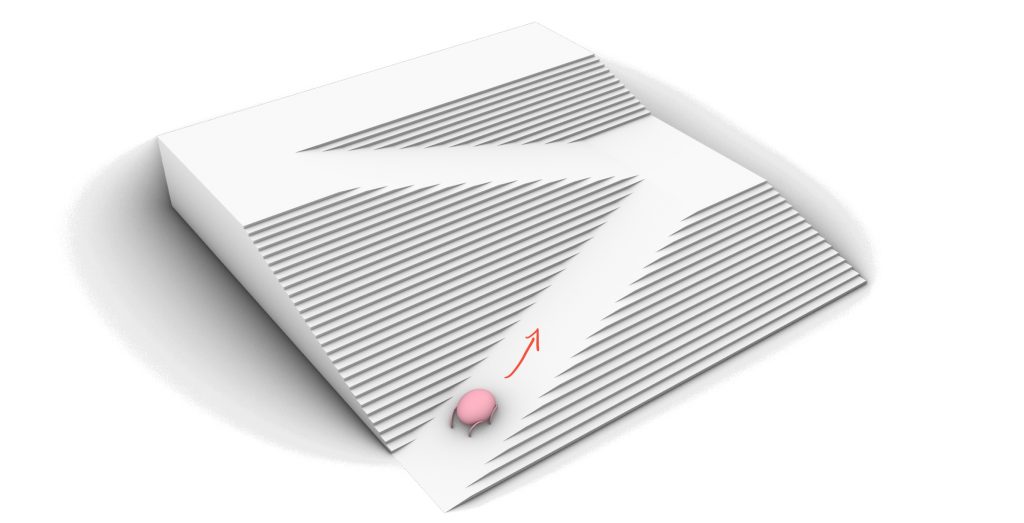
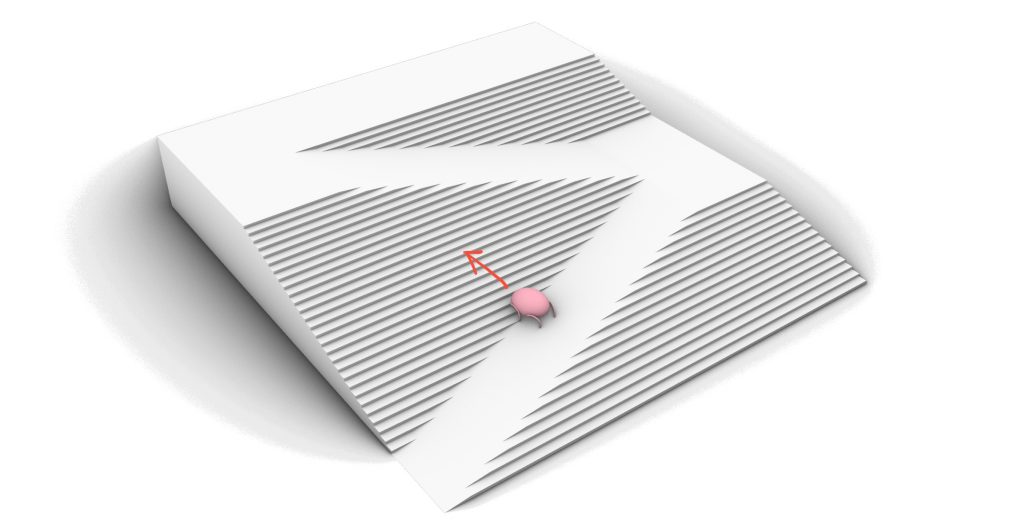
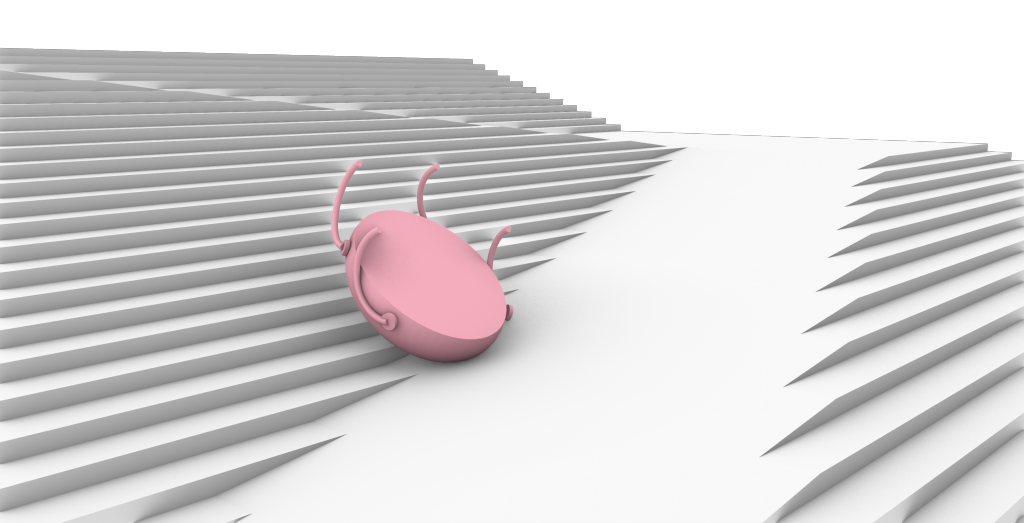
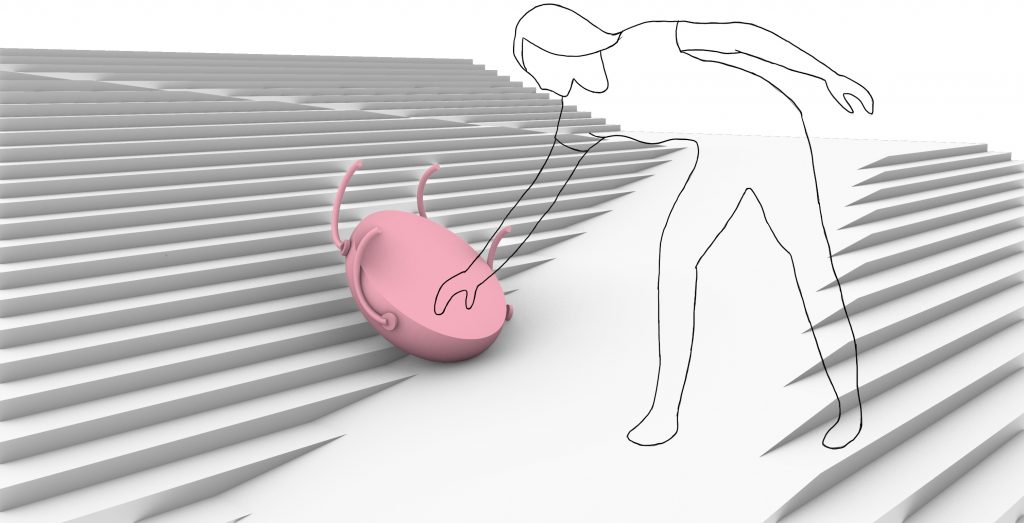
The obstacle that this robot will need to overcome is a ramp/staircase that the robot needs to climb. The robot will easily be able to overcome the ramp, but eventually, the robot will become impatient, and attempt to climb the staircase instead. This will cause the robot to flip onto its back. This will hopefully entice the human to step in and flip the robot back over and guide it back up the ramp. The robot will then continue up the ramp and summit the course.
For the hardware and software, the legs will be attached to the machined body that we discussed before. They will consist of four motors attached to curved legs, as seen in the video. We are not sure of the exact software that would be needed for programming these motors, but we imagine it would not be too complicated.
If we are unable to meet in class, in person, due to the pandemic, both of us are located in Pittsburgh currently so we would be able to meet up and construct/program the robot together. We would not be able to machine the body so alternate, less intricate measures would need to be explored.
Comments are closed.