Our performance objectives and outcomes.
The main idea behind our suitcase robot was to play with the things being revealed/concealed under the lid.
We wanted to have an object being concealed under fan-like obstructions being moved by the motors. The fans would turn to hide the object based on the opening and closing of the suitcase and how slow or fast you were opening it.
In place of sensors, we made two separate scripts: one where the fans swiveled to conceal the object and another where the fans organically moved to reveal the object.
Fabrications
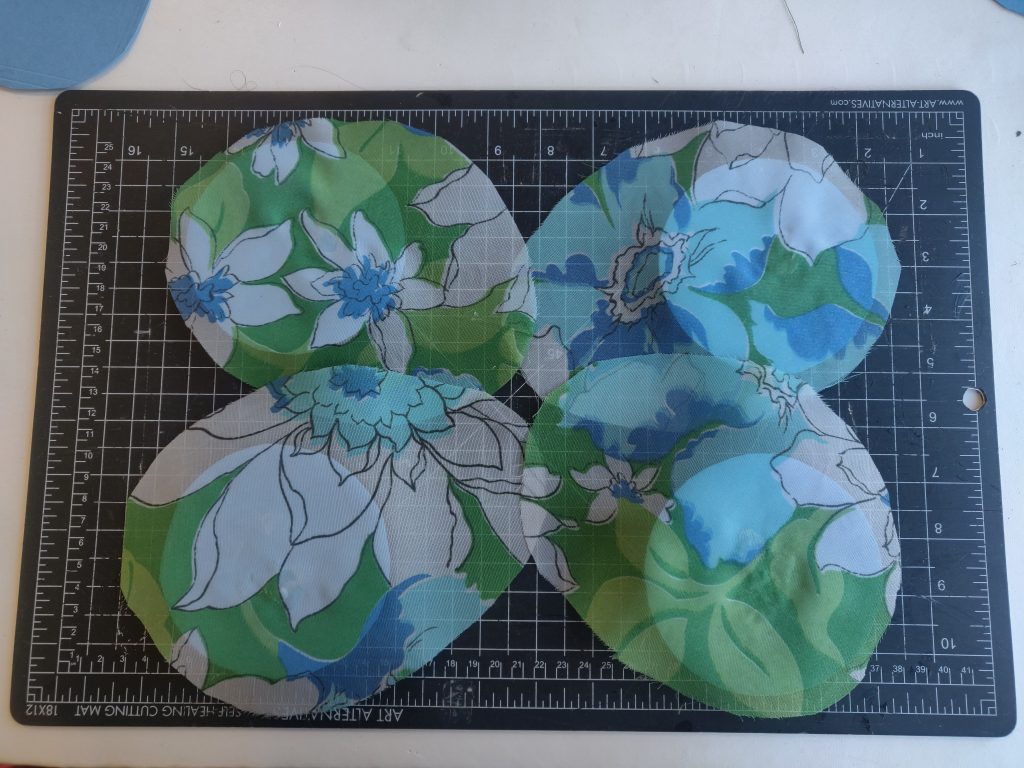
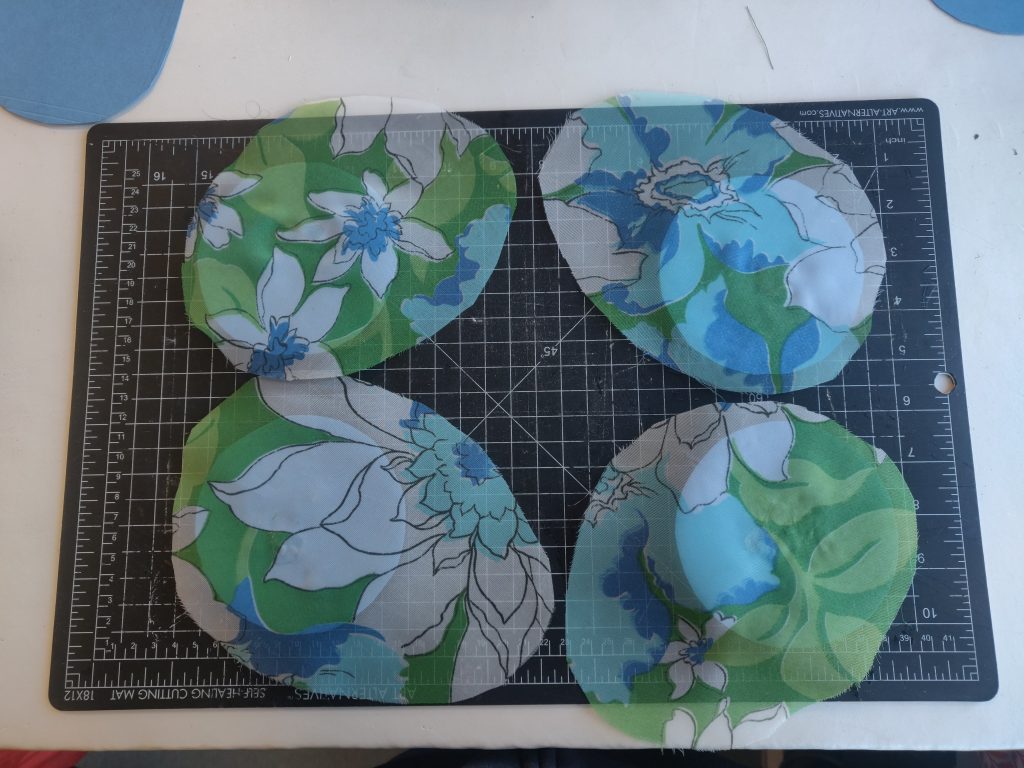
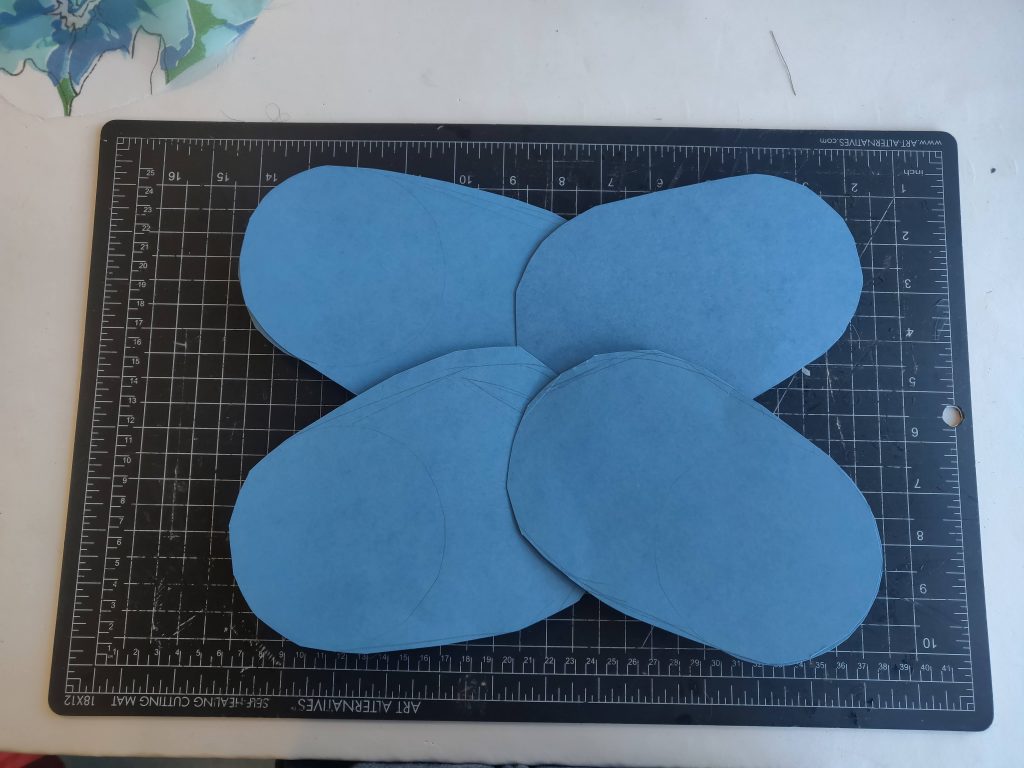
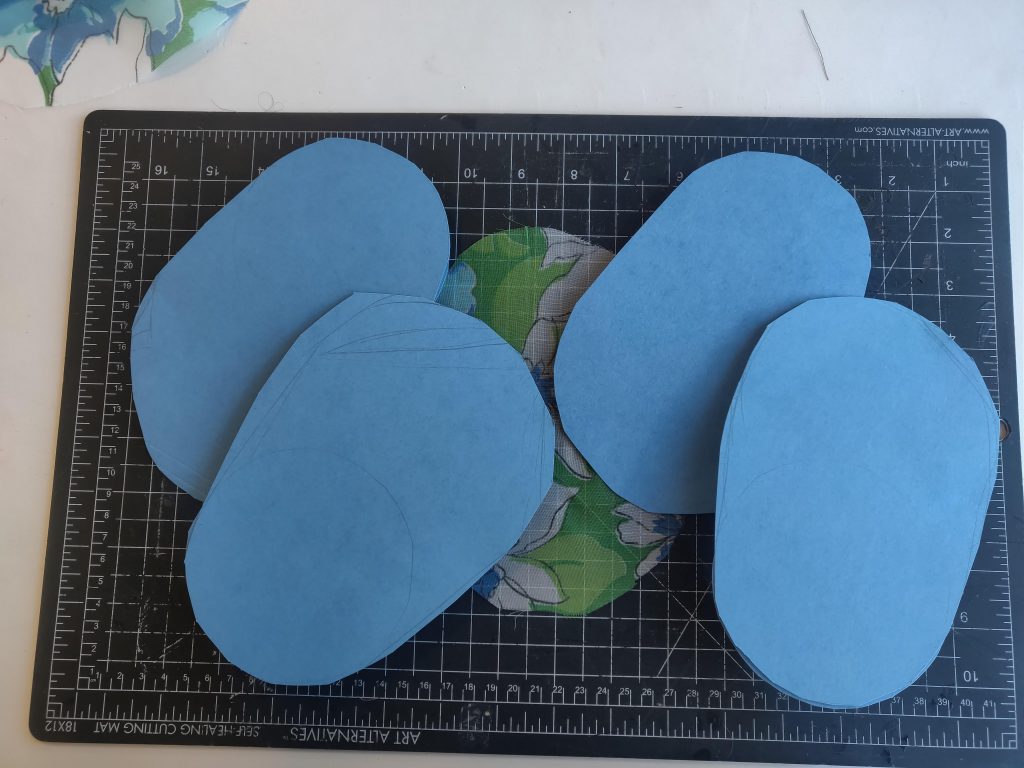
Bellow are pictures of two versions of the “fans” we envisioned would be doing the obscuring and revealing. I made one system out of cardstock, and the other with a combination of cardstock and starched printed organza fabric. In order to effectively obscure something underneath the fans must overlap. The first image shows the underside of the fans which would be set at staggering heights to allow the fans to pass mores smoothly past each other. The idea behind using fabric came from the fact that the fans would be running into the walls of the suitcase, so having a softer material like fabric would allow the fan to continue turning even if the fabric brushed the side of the wall. however, the fabric was not quite rigid enough to still act as a fan so pleated it in the future might work better.


Short video clip (under one minute) of live performance.

Zip file (CAD/design files + final performance code)
Link here: https://drive.google.com/drive/folders/1zuizTJet8kcuYNbmBzLZ1BSF4uDrWuSb?usp=sharing