I wanted to create the building blocks for a cybernetic system exploring the idea of being scared of the dark. The main cycle would revolve around the robot investigating suspicious locations in the dark. The user could add interest points by clicking around the map, which would both override the background noise and add a bit of panic to the robot.
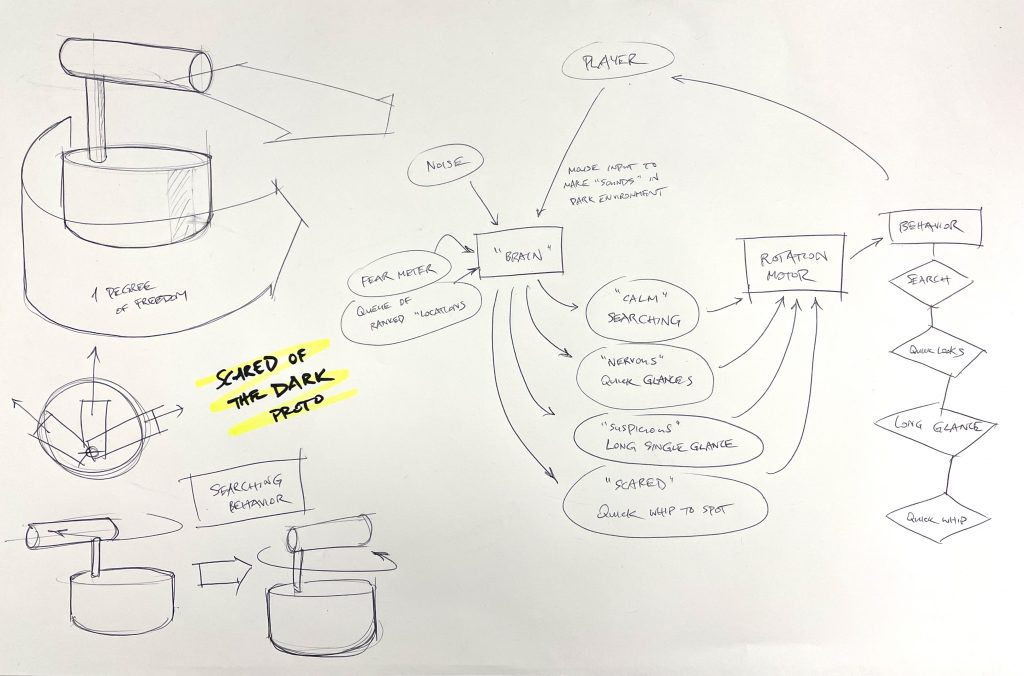
I started with the double pendulum project and heavily modified the controller and the model. In order to resemble the lamp shape, I ended up using a wide rectangle as the neck and a yellow capsule as the head. I haven’t ended up coding in the logic for the search process, but instead encoded poses and positions with different amounts of torque to simulate different amounts of panic. I also added a “panic button” that whips the head around to a random position as fast as possible. Played with lighting + camera angles to give a slight skew to the framing to add a bit of unease.