When generating ideas I focused on the idea of using randomness to my advantage with a robot design. I wanted to focus on the idea of organizing chaos or finding order in random chaos. My three ideas represent that exploration/inquiry.
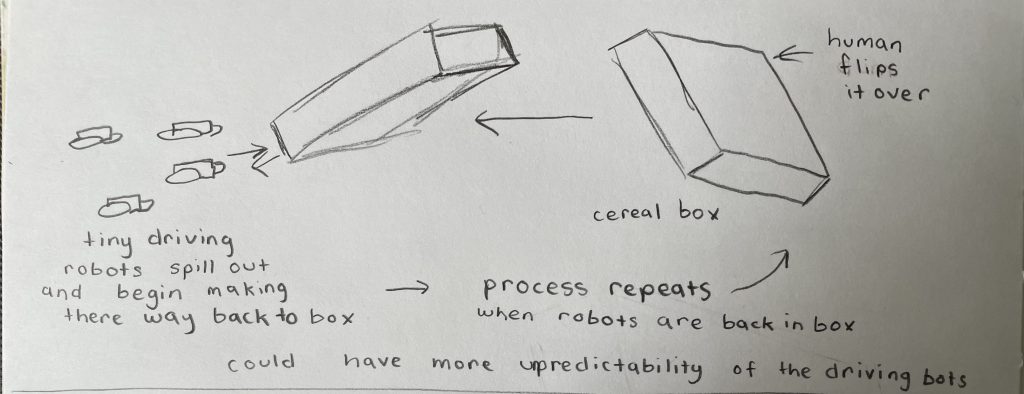
This first idea is kind of like spilling a box of cereal that is actually small driving robots. The performer would dump the contents of the box out and then set the box down in a way that the robots can find their way back inside. Another way to do this is to put the box on a low enough axle that the robots can climb back in and tilt the box back up to an upright position.
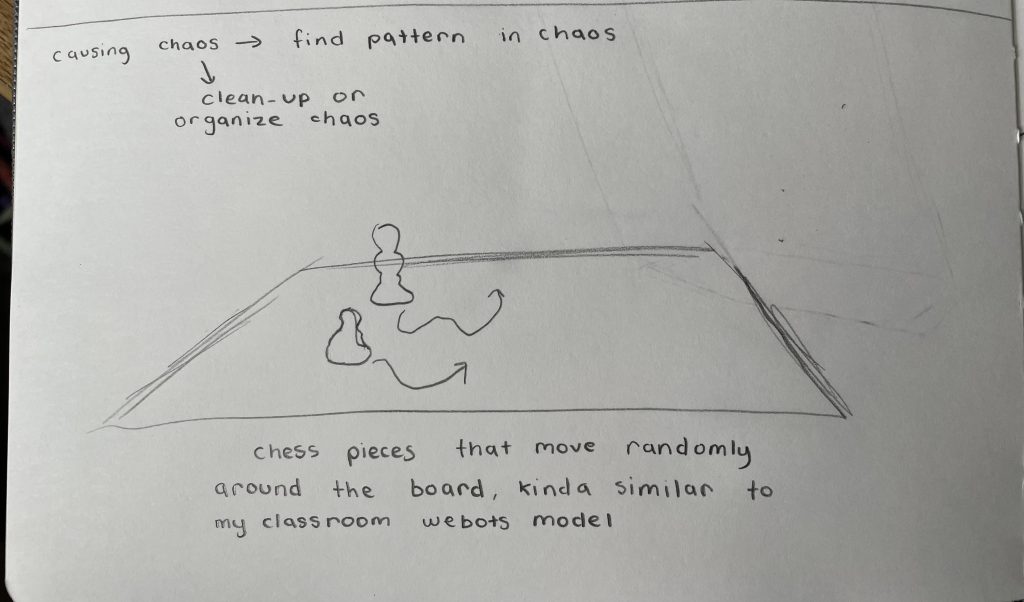
This idea is just another version of my robot model with multiple driving robots but in a different setting.
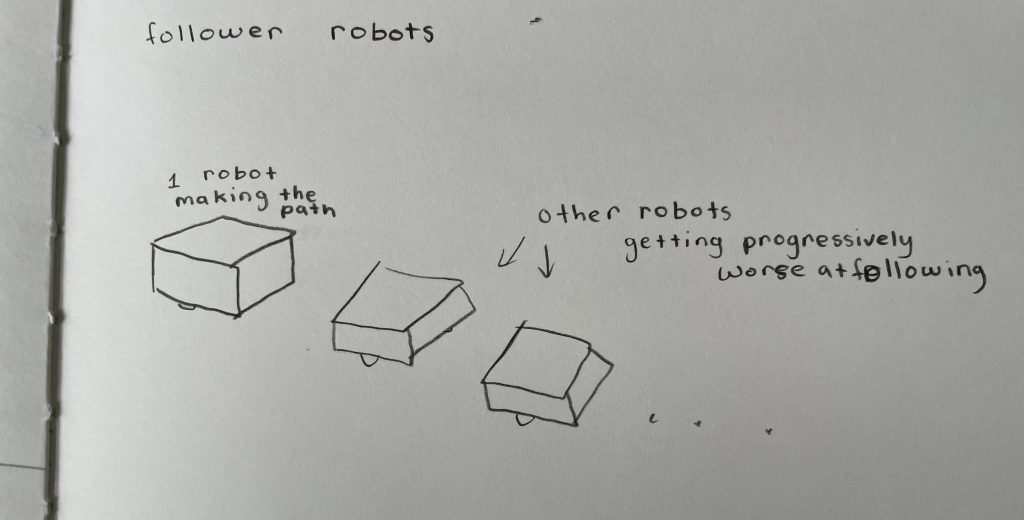
I think that the performer with this idea would enter in as the controller of the first robot. The following robots would be attempting to follow the next robot the best they could.