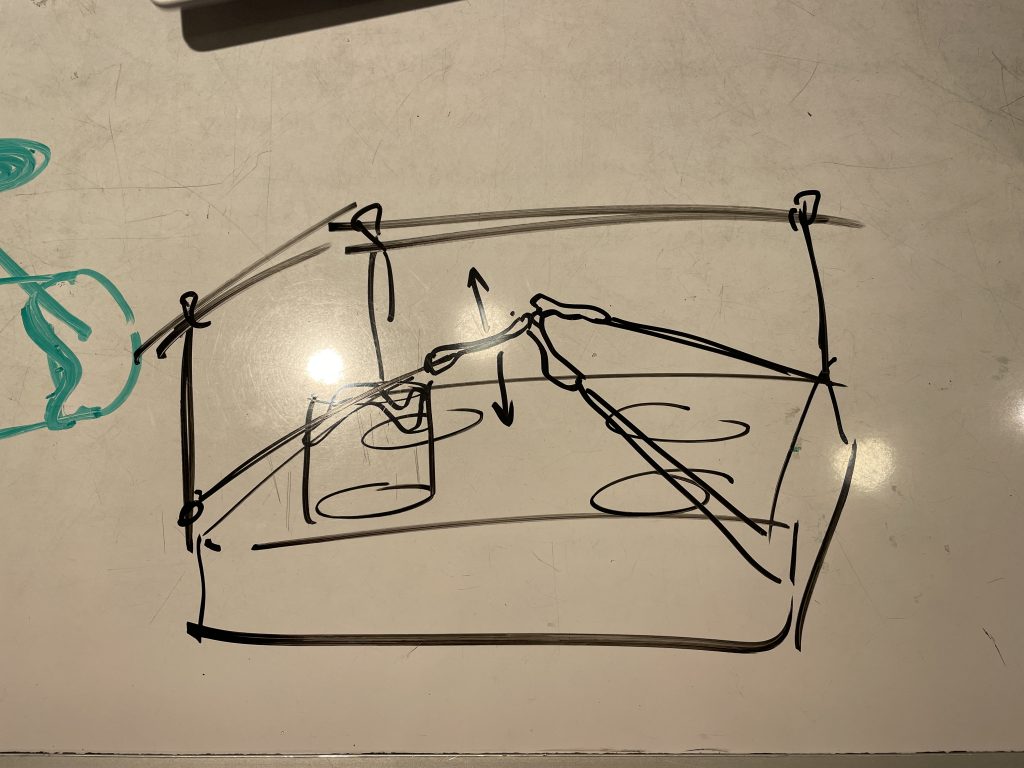
Our initial sketch idea was focused on translating rotational motion from the stepper motors to some sort of vertical motion. We wanted to try a mechanism similar to a glue stick to vertically raise the arm, but settled on a lever system that used a rotating cylinder to move the fulcrum point vertically.
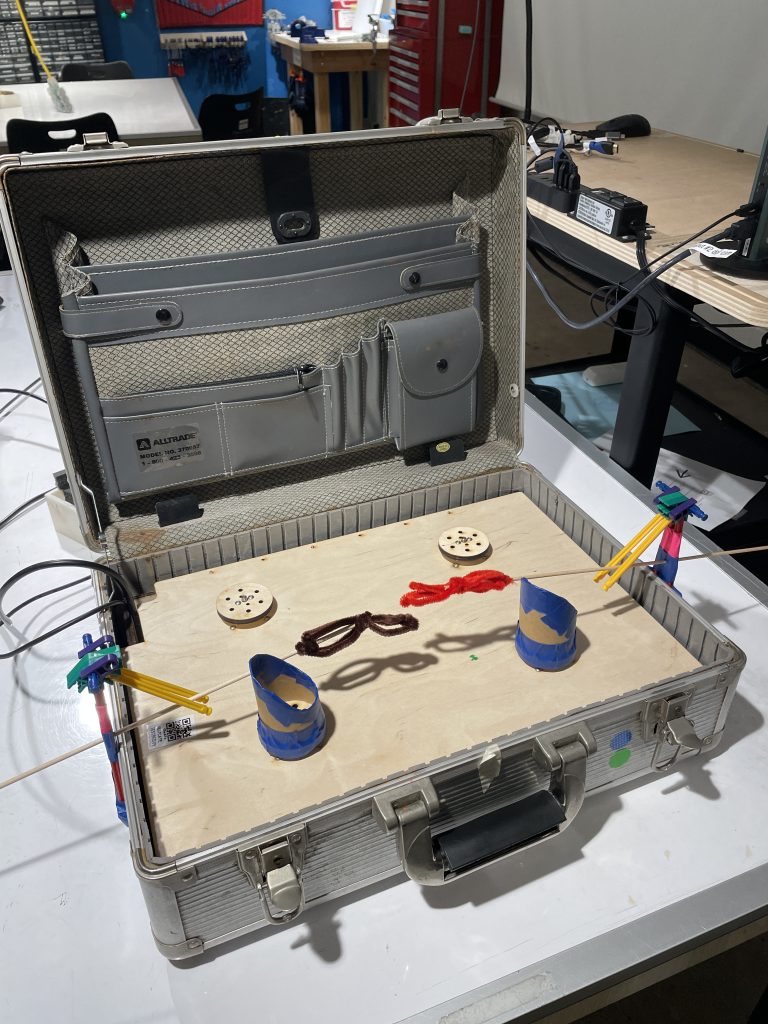
Building was more challenging than we expected, since the extra slop in the restraints made the skewers keep slipping off the spinners. We ended up using plastic Knex pieces taped together with small holes punched through the tape to restrict as many degrees of freedom as possible. To add to the organic feeling, we attached pipe cleaners in the shape of fingers to just barely reach each other.
Our performance focused on the interaction of two entities that could only sense each other through touch. We imagined a dark world where vision was completely replaced by tactile sensation and were curious on how to represent the emotions of meeting another figure in that context and how they would overcome their initial fears to embrace the connection that they had found.